Se dan tareas para trabajos analíticos y gráficos de liquidación en todas las secciones del curso de mecánica técnica. Cada tarea incluye una descripción de la solución de problemas con breves pautas, se dan ejemplos de soluciones. Los anexos contienen el material de referencia necesario. Para estudiantes de especialidades de construcción de escuelas secundarias de formación profesional.
Determinación de reacciones de enlaces ideales de forma analítica.
1. Indicar el punto cuyo equilibrio se está considerando. En tareas para trabajo independiente, dicho punto es el centro de gravedad del cuerpo o el punto de intersección de todas las varillas e hilos.
2. Aplicar fuerzas activas al punto considerado. En tareas de trabajo autónomo, las fuerzas activas son el propio peso del cuerpo o el peso de la carga, que se dirigen hacia abajo (más correctamente, hacia el centro de gravedad de la tierra). En presencia de un bloque, el peso de la carga actúa sobre el punto considerado a lo largo del hilo. La dirección de esta fuerza se determina a partir del dibujo. El peso corporal generalmente se denota con la letra G.
3. Deseche mentalmente las conexiones, reemplazando su acción con reacciones de conexiones. En los problemas propuestos, se utilizan tres tipos de enlaces: un plano idealmente liso, varillas rectas idealmente rígidas e hilos idealmente flexibles, en lo sucesivo denominados plano, varilla e hilo, respectivamente.
TABLA DE CONTENIDO
Prefacio
Sección I. Trabajo independiente y de control
Capítulo 1. Mecánica teórica. Estática
1.1. Determinación analítica de reacciones de enlaces ideales
1.2. Determinación de las reacciones de apoyo de una viga sobre dos apoyos bajo la acción de cargas verticales
1.3. Determinación de la posición del centro de gravedad de la sección
Capítulo 2. Resistencia de los materiales
2.1. Selección de secciones de varillas en función de la resistencia.
2.2. Determinación de los principales momentos de inercia centrales de la sección.
2.3. Trazado de fuerzas cortantes y momentos de flexión para una viga simple
2.4. Determinación del valor permisible de la fuerza de compresión central.
Capítulo 3
3.1. Construcción de diagramas de fuerzas internas para el marco de un solo circuito más simple
3.2. Determinación gráfica de fuerzas en tirantes mediante la construcción de un diagrama de Maxwell-Cremona
3.3. Determinación de movimientos lineales en los pórticos en voladizo más simples
3.4. Cálculo de una viga estáticamente indeterminada (continua) según la ecuación de tres momentos
Sección II. Asentamiento y obra gráfica
Capítulo 4. Mecánica teórica. Estática
4.1. Determinación de fuerzas en las varillas de la armadura en voladizo más simple
4.2. Determinación de las reacciones en los apoyos de una viga sobre dos apoyos
4.3. Determinación de la posición del centro de gravedad de la sección
Capítulo 5
5.1. Determinación de fuerzas en barras de un sistema estáticamente indeterminado
5.2. Determinación de los principales momentos de inercia de la sección.
5.3. Selección de la sección de una viga a partir de una viga I laminada
5.4. Selección de la sección de la cremallera compuesta centralmente comprimida
Capítulo 6
6.1. Determinación de fuerzas en secciones de un arco triarticulado
6.2. Determinación gráfica de fuerzas en las barras de una armadura plana mediante la construcción de un diagrama de Maxwell - Cremona
6.3. Cálculo de un marco estáticamente indeterminado
6.4. Cálculo de una viga continua según la ecuación de tres momentos
Aplicaciones
Bibliografía.
Descargue gratis el libro electrónico en un formato conveniente, mire y lea:
Descargue el libro Colección de problemas en mecánica técnica, Setkov VI, 2003 - fileskachat.com, descarga rápida y gratuita.
Descargar PDF
A continuación puede comprar este libro al mejor precio con descuento y entrega en toda Rusia.
Muchos estudiantes universitarios enfrentan ciertas dificultades cuando comienzan a enseñar disciplinas técnicas básicas, como resistencia de materiales y mecánica teórica, en su curso de estudio. Este artículo considerará uno de estos temas: la llamada mecánica técnica.
La mecánica técnica es una ciencia que estudia diversos mecanismos, su síntesis y análisis. En la práctica, esto significa una combinación de tres disciplinas: resistencia de materiales, mecánica teórica y piezas de máquinas. Es conveniente que cada institución educativa elija en qué proporción impartir estos cursos.
En consecuencia, en la mayoría de los trabajos de control, las tareas se dividen en tres bloques, que deben resolverse por separado o en conjunto. Consideremos las tareas más comunes.
Seccion uno. Mecánica teórica
De la variedad de problemas de la mecánica teórica, uno puede encontrar con mayor frecuencia problemas de la sección de cinemática y estática. Estas son tareas sobre el equilibrio de un marco plano, la definición de las leyes de movimiento de los cuerpos y el análisis cinemático del mecanismo de palanca.
Para resolver problemas de equilibrio de un marco plano, es necesario utilizar la ecuación de equilibrio para un sistema plano de fuerzas:
![]()
La suma de las proyecciones de todas las fuerzas sobre los ejes de coordenadas es igual a cero y la suma de los momentos de todas las fuerzas con respecto a cualquier punto es igual a cero. Al resolver estas ecuaciones juntas, determinamos la magnitud de las reacciones de todos los soportes del marco plano.
En tareas de determinación de los principales parámetros cinemáticos del movimiento de cuerpos, es necesario, a partir de una trayectoria dada o de la ley de movimiento de un punto material, determinar su velocidad, aceleración (plena, tangencial y normal) y el radio de curvatura de la trayectoria. Las leyes del movimiento puntual están dadas por las ecuaciones de trayectoria:
Las proyecciones de la velocidad puntual sobre los ejes de coordenadas se obtienen derivando las ecuaciones correspondientes:
![]()
Al diferenciar las ecuaciones de velocidad, encontramos las proyecciones de la aceleración del punto. Las aceleraciones tangencial y normal, el radio de curvatura de la trayectoria se encuentran gráfica o analíticamente:
![]()
![]()
El análisis cinemático del mecanismo de palanca se lleva a cabo de acuerdo con el siguiente esquema:
- Partición del mecanismo en grupos Assur
- Construcción para cada uno de los grupos de planes de velocidades y aceleraciones
- Determinación de velocidades y aceleraciones de todos los eslabones y puntos del mecanismo.
Sección dos. Resistencia de materiales
La resistencia de los materiales es un apartado bastante difícil de entender, con muchas tareas diferentes, la mayoría de las cuales se resuelven según su propia metodología. Para facilitar a los estudiantes la resolución de sus problemas, la mayoría de las veces, en el curso de la mecánica aplicada, se les presentan problemas elementales para la resistencia simple de las estructuras; además, el tipo y el material de la estructura, por regla general, dependen de la perfil de la universidad.
Los problemas más comunes son tensión-compresión, flexión y torsión.
En problemas de tracción-compresión es necesario construir diagramas de esfuerzos longitudinales y normales, y en ocasiones también de desplazamientos de secciones estructurales.
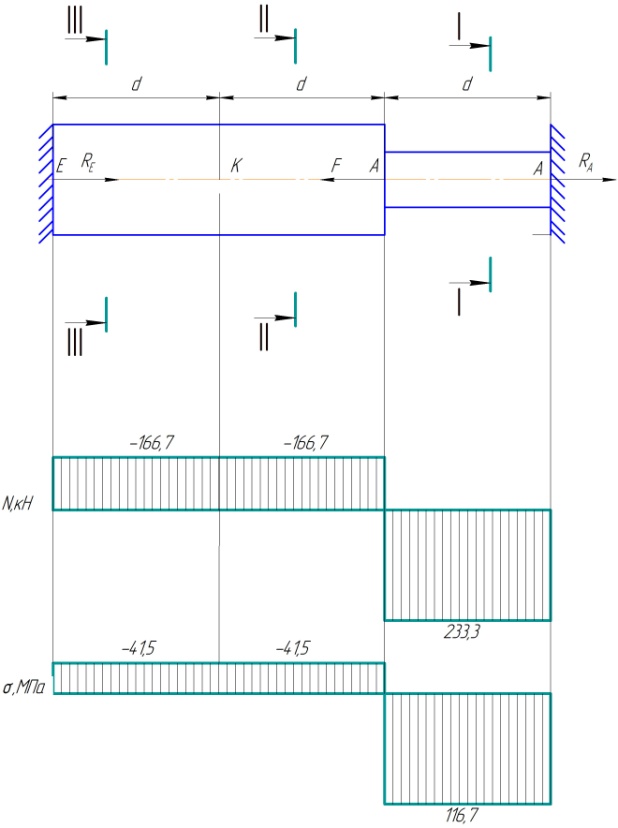
Para hacer esto, es necesario dividir la estructura en secciones, cuyos límites serán los lugares donde se aplica la carga o cambia el área de la sección transversal. Además, aplicando las fórmulas para el equilibrio de un cuerpo sólido, determinamos los valores de las fuerzas internas en los límites de las secciones y, teniendo en cuenta el área de la sección transversal, las tensiones internas.
De acuerdo con los datos obtenidos, construimos gráficos: diagramas, tomando el eje de simetría de la estructura como eje del gráfico.
Los problemas de torsión son similares a los problemas de flexión, excepto que en lugar de fuerzas de tracción, se aplican torsiones al cuerpo. Con esto en mente, es necesario repetir los pasos de cálculo: dividir en secciones, determinar los momentos de torsión y los ángulos de torsión y trazar.
En problemas de flexión, es necesario calcular y determinar las fuerzas transversales y los momentos de flexión para una viga cargada.
En primer lugar, se determinan las reacciones de los soportes en los que se fija la viga. Para hacer esto, debe escribir las ecuaciones de equilibrio de la estructura, teniendo en cuenta todas las fuerzas actuantes.
Después de eso, la viga se divide en secciones, cuyos límites serán los puntos de aplicación de fuerzas externas. Al considerar el equilibrio de cada sección por separado, se determinan las fuerzas transversales y los momentos flectores en los límites de las secciones. Con base en los datos obtenidos, se construyen parcelas.
La prueba de resistencia de la sección transversal se lleva a cabo de la siguiente manera:
- Se determina la ubicación de la sección peligrosa: la sección donde actuarán los mayores momentos de flexión.
- A partir de la condición de resistencia a la flexión, se determina el momento de resistencia de la sección transversal de la viga.
- Se determina el tamaño característico de la sección: diámetro, longitud lateral o número de perfil.
Sección tres. Partes de máquina
La sección "Detalles de la máquina" combina todas las tareas para calcular mecanismos que funcionan en condiciones reales; puede ser un accionamiento de cinta transportadora o un tren de engranajes. Facilita enormemente la tarea que todas las fórmulas y métodos de cálculo se den en libros de referencia, y el estudiante solo necesita elegir aquellos que son adecuados para un mecanismo dado.
Literatura
- Mecánica teórica: Directrices y tareas de control para estudiantes a tiempo parcial de las especialidades de ingeniería, construcción, transporte, instrumentación de instituciones de educación superior / Ed. profe. S.M. Targa, - M.: Higher School, 1989. Cuarta edición;
- A. V. Darkov, G. S. Shpiro. "Resistencia de materiales";
- Chernavski S.A. Curso de diseño de piezas de máquinas: Proc. manual para estudiantes de especialidades de ingeniería mecánica de escuelas técnicas / S. A. Chernavsky, K. N. Bokov, I. M. Chernin, etc. - 2ª ed., revisada. y adicional - M. Mashinostroenie, 1988. - 416 p.: il.
Solución de mecánica técnica a pedido
Nuestra empresa también ofrece servicios de resolución de problemas y pruebas en mecánica. Si tiene dificultades para comprender este tema, siempre puede pedirnos una solución detallada. ¡Asumimos tareas difíciles!
puede ser gratis
Mecánica teórica- Esta es una rama de la mecánica, que establece las leyes básicas del movimiento mecánico y la interacción mecánica de los cuerpos materiales.
La mecánica teórica es una ciencia en la que se estudian los movimientos de los cuerpos a lo largo del tiempo (movimientos mecánicos). Sirve como base para otras secciones de la mecánica (la teoría de la elasticidad, la resistencia de los materiales, la teoría de la plasticidad, la teoría de los mecanismos y las máquinas, la hidroaerodinámica) y muchas disciplinas técnicas.
movimiento mecanico- este es un cambio en el tiempo en la posición relativa en el espacio de los cuerpos materiales.
Interacción mecánica- esta es una interacción de este tipo, como resultado de lo cual cambia el movimiento mecánico o cambia la posición relativa de las partes del cuerpo.
Estática de cuerpo rígido
Estática- Esta es una rama de la mecánica teórica, que se ocupa de los problemas de equilibrio de los cuerpos sólidos y de la transformación de un sistema de fuerzas en otro equivalente a éste.
- Conceptos básicos y leyes de la estática.
- Cuerpo absolutamente rígido(cuerpo sólido, cuerpo) es un cuerpo material, la distancia entre los puntos en los que no cambia.
- punto material es un cuerpo cuyas dimensiones, según las condiciones del problema, pueden despreciarse.
- cuerpo suelto es un cuerpo, a cuyo movimiento no se imponen restricciones.
- Cuerpo no libre (ligado) Es un cuerpo cuyo movimiento está restringido.
- Conexiones- estos son cuerpos que impiden el movimiento del objeto en consideración (un cuerpo o un sistema de cuerpos).
- Reacción de comunicación es una fuerza que caracteriza la acción de un enlace sobre un cuerpo rígido. Si consideramos la fuerza con la que un cuerpo rígido actúa sobre un enlace como una acción, entonces la reacción del enlace es una contrarrestación. En este caso, la fuerza - acción se aplica a la conexión y la reacción de la conexión se aplica al cuerpo sólido.
- sistema mecánico es un conjunto de cuerpos interconectados o puntos materiales.
- Sólido puede considerarse como un sistema mecánico, cuyas posiciones y distancia entre los puntos no cambian.
- Fuerza es una cantidad vectorial que caracteriza la acción mecánica de un cuerpo material sobre otro.
La fuerza como vector se caracteriza por el punto de aplicación, la dirección de acción y el valor absoluto. La unidad de medida del módulo de fuerza es Newton. - linea de fuerza es la línea recta a lo largo de la cual se dirige el vector de fuerza.
- Poder concentrado es la fuerza aplicada en un punto.
- Fuerzas distribuidas (carga distribuida)- son fuerzas que actúan sobre todos los puntos del volumen, superficie o longitud del cuerpo.
La carga distribuida viene dada por la fuerza que actúa por unidad de volumen (superficie, longitud).
La dimensión de la carga distribuida es N / m 3 (N / m 2, N / m). - Fuerza externa es una fuerza que actúa de un cuerpo que no pertenece al sistema mecánico considerado.
- fuerza interior es una fuerza que actúa sobre un punto material de un sistema mecánico desde otro punto material perteneciente al sistema considerado.
- sistema de fuerza es la totalidad de las fuerzas que actúan sobre un sistema mecánico.
- Sistema plano de fuerzas es un sistema de fuerzas cuyas líneas de acción se encuentran en un mismo plano.
- Sistema espacial de fuerzas es un sistema de fuerzas cuyas líneas de acción no se encuentran en el mismo plano.
- Sistema de fuerzas convergentes Es un sistema de fuerzas cuyas líneas de acción se cortan en un punto.
- Sistema arbitrario de fuerzas es un sistema de fuerzas cuyas líneas de acción no se cortan en un punto.
- Sistemas de fuerzas equivalentes- estos son sistemas de fuerzas, cuya sustitución una por otra no cambia el estado mecánico del cuerpo.
Designación aceptada: . - Equilibrio Estado en el que un cuerpo permanece estacionario o se mueve uniformemente en línea recta bajo la acción de fuerzas.
- sistema equilibrado de fuerzas- este es un sistema de fuerzas que, cuando se aplica a un cuerpo sólido libre, no cambia su estado mecánico (no lo desequilibra).
 .
. - fuerza resultante Es una fuerza cuya acción sobre un cuerpo equivale a la acción de un sistema de fuerzas.
 .
. - Momento de poder es un valor que caracteriza la capacidad de rotación de la fuerza.
- pareja de poder Es un sistema de dos fuerzas paralelas iguales en valor absoluto y de dirección opuesta.
Designación aceptada: .
Bajo la acción de un par de fuerzas, el cuerpo realizará un movimiento de rotación. - Proyección de fuerza sobre el eje- este es un segmento encerrado entre perpendiculares dibujadas desde el principio y el final del vector de fuerza a este eje.
La proyección es positiva si la dirección del segmento coincide con la dirección positiva del eje. - Proyección de fuerza en un plano es un vector en un plano encerrado entre las perpendiculares trazadas desde el principio y el final del vector fuerza a este plano.
- Ley 1 (ley de la inercia). Un punto material aislado está en reposo o se mueve uniforme y rectilíneamente.
El movimiento uniforme y rectilíneo de un punto material es un movimiento por inercia. El estado de equilibrio de un punto material y un cuerpo rígido se entiende no sólo como un estado de reposo, sino también como un movimiento por inercia. Para un cuerpo rígido, existen varios tipos de movimiento de inercia, por ejemplo, la rotación uniforme de un cuerpo rígido alrededor de un eje fijo. - Ley 2. Un cuerpo rígido está en equilibrio bajo la acción de dos fuerzas solo si estas fuerzas son de igual magnitud y están dirigidas en direcciones opuestas a lo largo de una línea de acción común.
Estas dos fuerzas se llaman equilibradas.
En general, se dice que las fuerzas están equilibradas si el cuerpo rígido al que se aplican estas fuerzas está en reposo. - Ley 3. Sin violar el estado (la palabra "estado" aquí significa el estado de movimiento o reposo) de un cuerpo rígido, uno puede agregar y descartar fuerzas de equilibrio.
Consecuencia. Sin alterar el estado de un cuerpo rígido, la fuerza se puede transferir a lo largo de su línea de acción a cualquier punto del cuerpo.
Dos sistemas de fuerzas se llaman equivalentes si uno de ellos puede ser reemplazado por otro sin alterar el estado del cuerpo rígido. - Ley 4. La resultante de dos fuerzas aplicadas en un punto se aplica en el mismo punto, es igual en valor absoluto a la diagonal del paralelogramo construido sobre estas fuerzas y está dirigida a lo largo de este
diagonales
El módulo de la resultante es: - Ley 5 (ley de igualdad de acción y reacción). Las fuerzas con las que actúan dos cuerpos entre sí son de igual magnitud y están dirigidas en direcciones opuestas a lo largo de una línea recta.
Debe tenerse en cuenta que acción- fuerza aplicada al cuerpo B, y oposición- fuerza aplicada al cuerpo PERO, no están equilibrados, ya que están unidos a cuerpos diferentes. - Ley 6 (la ley del endurecimiento). El equilibrio de un cuerpo no sólido no se altera cuando se solidifica.
No debe olvidarse que las condiciones de equilibrio, que son necesarias y suficientes para un cuerpo rígido, son necesarias pero insuficientes para el correspondiente cuerpo no rígido. - Ley 7 (la ley de liberación de bonos). Un cuerpo sólido no libre puede considerarse libre si se libera mentalmente de las ataduras, reemplazando la acción de las ataduras por las correspondientes reacciones de las ataduras.
- Conexiones y sus reacciones.
- Superficie lisa restringe el movimiento a lo largo de la normal a la superficie de apoyo. La reacción se dirige perpendicularmente a la superficie.
- Soporte móvil articulado limita el movimiento del cuerpo a lo largo de la normal al plano de referencia. La reacción se dirige a lo largo de la normal a la superficie de apoyo.
- Soporte fijo articulado contrarresta cualquier movimiento en un plano perpendicular al eje de rotación.
- Caña ingrávida articulada contrarresta el movimiento del cuerpo a lo largo de la línea de la varilla. La reacción se dirigirá a lo largo de la línea de la barra.
- terminación ciega contrarresta cualquier movimiento y rotación en el plano. Su acción puede ser sustituida por una fuerza presentada en forma de dos componentes y un par de fuerzas con un momento.




Cinemática
Cinemática- una sección de mecánica teórica, que considera las propiedades geométricas generales del movimiento mecánico, como un proceso que ocurre en el espacio y el tiempo. Los objetos en movimiento se consideran puntos geométricos o cuerpos geométricos.
- Conceptos básicos de cinemática.
- La ley de movimiento de un punto (cuerpo) es la dependencia de la posición de un punto (cuerpo) en el espacio con respecto al tiempo.
- Punto de trayectoria es el lugar geométrico de las posiciones de un punto en el espacio durante su movimiento.
- Velocidad del punto (cuerpo)- esta es una característica del cambio en el tiempo de la posición de un punto (cuerpo) en el espacio.
- Aceleración puntual (cuerpo)- esta es una característica del cambio en el tiempo de la velocidad de un punto (cuerpo).
- Determinación de las características cinemáticas de un punto
- Punto de trayectoria
En el sistema de referencia vectorial, la trayectoria se describe mediante la expresión: .
En el sistema de coordenadas de referencia, la trayectoria se determina según la ley del movimiento puntual y se describe mediante las expresiones z = f(x,y) en el espacio, o y = f(x)- en el avión.
En un sistema de referencia natural, la trayectoria está predeterminada. - Determinación de la velocidad de un punto en un sistema de coordenadas vectoriales
Al especificar el movimiento de un punto en un sistema de coordenadas vectoriales, la relación entre el movimiento y el intervalo de tiempo se denomina valor promedio de la velocidad en este intervalo de tiempo: .
Tomando el intervalo de tiempo como un valor infinitesimal, se obtiene el valor de la velocidad en un momento dado (el valor instantáneo de la velocidad): .
.
El vector de velocidad promedio se dirige a lo largo del vector en la dirección del movimiento del punto, el vector de velocidad instantánea se dirige tangencialmente a la trayectoria en la dirección del movimiento del punto.
Conclusión: la velocidad de un punto es una cantidad vectorial igual a la derivada de la ley del movimiento con respecto al tiempo.
Propiedad derivada: la derivada temporal de cualquier valor determina la tasa de cambio de este valor. - Determinación de la velocidad de un punto en un sistema de referencia de coordenadas
Tasa de cambio de las coordenadas del punto: .
.
El módulo de la velocidad total de un punto con sistema de coordenadas rectangular será igual a: .
.
La dirección del vector de velocidad está determinada por los cosenos de los ángulos de dirección: ,
,
donde son los ángulos entre el vector velocidad y los ejes de coordenadas. - Determinación de la velocidad de un punto en un sistema de referencia natural
La velocidad de un punto en un sistema de referencia natural se define como una derivada de la ley de movimiento de un punto: .
De acuerdo con las conclusiones anteriores, el vector velocidad está dirigido tangencialmente a la trayectoria en la dirección del movimiento del punto y en los ejes está determinado por una sola proyección.
- Cinemática de cuerpo rígido
- En la cinemática de cuerpos rígidos se resuelven dos problemas principales:
1) tarea de movimiento y determinación de las características cinemáticas del cuerpo en su conjunto;
2) determinación de las características cinemáticas de los puntos del cuerpo. - Movimiento de traslación de un cuerpo rígido.
El movimiento de traslación es un movimiento en el que una línea recta trazada a través de dos puntos del cuerpo permanece paralela a su posición original.
Teorema: en el movimiento de traslación, todos los puntos del cuerpo se mueven a lo largo de las mismas trayectorias y en cada momento tienen la misma velocidad y aceleración en valor absoluto y dirección.
Conclusión: el movimiento de traslación de un cuerpo rígido está determinado por el movimiento de cualquiera de sus puntos, y por lo tanto, la tarea y estudio de su movimiento se reduce a la cinemática de un punto. - Movimiento de rotación de un cuerpo rígido alrededor de un eje fijo
El movimiento de rotación de un cuerpo rígido alrededor de un eje fijo es el movimiento de un cuerpo rígido en el que dos puntos pertenecientes al cuerpo permanecen inmóviles durante todo el tiempo del movimiento.
La posición del cuerpo está determinada por el ángulo de rotación. La unidad de medida de un ángulo son los radianes. (Un radián es el ángulo central de un círculo cuya longitud de arco es igual al radio, el ángulo completo del círculo contiene 2π radián.)
La ley del movimiento de rotación de un cuerpo alrededor de un eje fijo.
La velocidad angular y la aceleración angular del cuerpo se determinarán por el método de diferenciación:
— velocidad angular, rad/s;
— aceleración angular, rad/s².
Si cortamos el cuerpo por un plano perpendicular al eje, elegimos un punto en el eje de rotación Con y un punto arbitrario METRO, entonces el punto METRO describirá alrededor del punto Con círculo de radio R. Durante dt hay una rotación elemental a través del ángulo , mientras que el punto METRO se moverá a lo largo de la trayectoria por una distancia .
.
Módulo de velocidad lineal: .
.
punto de aceleración METRO con una trayectoria conocida está determinada por sus componentes: ,
,
donde .
.
Como resultado, obtenemos fórmulas
aceleración tangencial: ;
;
aceleración normal: .
.

Dinámica
Dinámica- Es una rama de la mecánica teórica, que estudia los movimientos mecánicos de los cuerpos materiales, en función de las causas que los provocan.
- Conceptos básicos de dinámica.
- inercia- esta es la propiedad de los cuerpos materiales para mantener un estado de reposo o movimiento rectilíneo uniforme hasta que fuerzas externas cambien este estado.
- Peso es una medida cuantitativa de la inercia de un cuerpo. La unidad de masa es el kilogramo (kg).
- punto material es un cuerpo con una masa, cuyas dimensiones se desprecian al resolver este problema.
- Centro de masa de un sistema mecánico. es un punto geométrico cuyas coordenadas están determinadas por las fórmulas:
donde metro k , x k , y k , z k- masa y coordenadas k- ese punto del sistema mecánico, metro es la masa del sistema.
En un campo de gravedad uniforme, la posición del centro de masa coincide con la posición del centro de gravedad. - Momento de inercia de un cuerpo material sobre el eje es una medida cuantitativa de la inercia durante el movimiento de rotación.
El momento de inercia de un punto material respecto al eje es igual al producto de la masa del punto por el cuadrado de la distancia del punto al eje: .
.
El momento de inercia del sistema (cuerpo) con respecto al eje es igual a la suma aritmética de los momentos de inercia de todos los puntos:
- La fuerza de inercia de un punto material. es una cantidad vectorial igual en valor absoluto al producto de la masa de un punto y el módulo de aceleración y en dirección opuesta al vector aceleración:
- Fuerza de inercia de un cuerpo material. es una cantidad vectorial igual en valor absoluto al producto de la masa del cuerpo y el módulo de aceleración del centro de masa del cuerpo y en dirección opuesta al vector de aceleración del centro de masa: ,
donde es la aceleración del centro de masa del cuerpo. - Impulso de fuerza elemental es una cantidad vectorial igual al producto del vector fuerza por un intervalo de tiempo infinitesimal dt:
.
El impulso total de fuerza para Δt es igual a la integral de impulsos elementales: .
. - trabajo de fuerza elemental es un escalar dA, igual al escalar
Cinemática
Cinemática de un punto material
Determinación de la velocidad y la aceleración de un punto según las ecuaciones dadas de su movimiento
Dado: Ecuaciones de movimiento de un punto: x = 12 pecado(πt/6), cm; y= 6 cos 2 (πt/6), cm.
Establezca el tipo de su trayectoria y para el momento de tiempo t = 1 s encontrar la posición de un punto en la trayectoria, su velocidad, aceleraciones completas, tangenciales y normales, así como el radio de curvatura de la trayectoria.
Movimiento de traslación y rotación de un cuerpo rígido.

Dado:
t = 2 s; r1 = 2 cm, R1 = 4 cm; r2 = 6 cm, R2 = 8 cm; r 3 \u003d 12 cm, R 3 \u003d 16 cm; s 5 \u003d t 3 - 6t (cm).
Determine en el tiempo t = 2 las velocidades de los puntos A, C; aceleración angular de la rueda 3; Aceleración del punto B y aceleración de cremallera 4.
Análisis cinemático de un mecanismo plano.

Dado:
R 1 , R 2 , L, AB, ω 1 .
Encuentre: ω 2 .

El mecanismo plano consta de las varillas 1, 2, 3, 4 y la corredera E. Las varillas están conectadas por medio de bisagras cilíndricas. El punto D está ubicado en el medio de la barra AB.
Dado: ω 1 , ε 1 .
Encuentre: velocidades V A , V B , V D y V E ; velocidades angulares ω 2 , ω 3 y ω 4 ; aceleración a B ; aceleración angular ε AB del eslabón AB; posiciones de los centros instantáneos de velocidades P 2 y P 3 de los eslabones 2 y 3 del mecanismo.
Determinación de la velocidad absoluta y la aceleración absoluta de un punto

Una placa rectangular gira alrededor de un eje fijo de acuerdo con la ley φ = 6 de 2 - 3 de 3. La dirección positiva de lectura del ángulo φ se muestra en las figuras mediante una flecha de arco. Eje de rotación OO 1 se encuentra en el plano de la placa (la placa gira en el espacio).
El punto M se mueve a lo largo de la línea recta BD a lo largo de la placa. Se da la ley de su movimiento relativo, es decir, la dependencia s = AM = 40(t - 2 t 3) - 40(s - en centímetros, t - en segundos). Distancia b = 20 centímetros. En la figura, el punto M se muestra en la posición donde s = AM > 0 (para s< 0 el punto M está al otro lado del punto A).
Encuentre la velocidad absoluta y la aceleración absoluta del punto M en el tiempo t 1 = 1 segundo.
Dinámica
Integración de ecuaciones diferenciales de movimiento de un punto material bajo la acción de fuerzas variables
Una carga D de masa m, habiendo recibido una velocidad inicial V 0 en el punto A, se mueve en un tubo curvo ABC ubicado en un plano vertical. En la sección AB, cuya longitud es l, la carga se ve afectada por una fuerza constante T (su dirección se muestra en la figura) y la fuerza R de la resistencia del medio (el módulo de esta fuerza es R = μV 2, el vector R está dirigido en sentido opuesto a la velocidad V de la carga).
La carga, habiendo completado su movimiento en la sección AB, en el punto B de la tubería, sin cambiar el valor de su módulo de velocidad, pasa a la sección BC. Sobre la sección BC, una fuerza variable F actúa sobre la carga, cuya proyección F x sobre el eje x está dada.
Considerando la carga como un punto material, encuentre la ley de su movimiento en la sección BC, es decir x = f(t), donde x = BD. Ignore la fricción de la carga en la tubería.

Descargar solución
Teorema sobre el cambio en la energía cinética de un sistema mecánico
El sistema mecánico consta de pesos 1 y 2, un rodillo cilíndrico 3, poleas de dos etapas 4 y 5. Los cuerpos del sistema están conectados por hilos enrollados en poleas; secciones de hilos son paralelas a los planos correspondientes. El rodillo (cilindro sólido homogéneo) rueda a lo largo del plano de referencia sin deslizarse. Los radios de los escalones de las poleas 4 y 5 son respectivamente R 4 = 0,3 m, r 4 = 0,1 m, R 5 = 0,2 m, r 5 = 0,1 m La masa de cada polea se considera uniformemente distribuida a lo largo de su borde exterior. Los planos de apoyo de las pesas 1 y 2 son rugosos, el coeficiente de rozamiento por deslizamiento de cada pesa es f = 0,1.
Bajo la acción de la fuerza F, cuyo módulo cambia según la ley F = F(s), donde s es el desplazamiento del punto de su aplicación, el sistema comienza a moverse desde un estado de reposo. Cuando el sistema se mueve, las fuerzas de resistencia actúan sobre la polea 5, cuyo momento relativo al eje de rotación es constante e igual a M 5 .
Determine el valor de la velocidad angular de la polea 4 en el momento en que el desplazamiento s del punto de aplicación de la fuerza F se hace igual a s 1 = 1,2 m. 
Descargar solución
Aplicación de la ecuación general de la dinámica al estudio del movimiento de un sistema mecánico
Para un sistema mecánico, determine la aceleración lineal a 1 . Considere que para bloques y rodillos las masas se distribuyen a lo largo del radio exterior. Los cables y cinturones se consideran ingrávidos e inextensibles; no hay deslizamiento. Ignore la fricción por rodadura y deslizamiento. 
Descargar solución
Aplicación del principio de d'Alembert a la determinación de las reacciones de los apoyos de un cuerpo en rotación
El eje vertical AK, que gira uniformemente con una velocidad angular ω = 10 s -1 , está fijo con un cojinete de empuje en el punto A y un cojinete cilíndrico en el punto D.
Una barra sin peso 1 con una longitud de l 1 = 0,3 m está unida rígidamente al eje, en cuyo extremo libre hay una carga de masa m 1 = 4 kg, y una barra homogénea 2 con una longitud de l 2 = 0,6 m, con una masa de m 2 = 8 kg. Ambas varillas se encuentran en el mismo plano vertical. Los puntos de unión de las varillas al eje, así como los ángulos α y β se indican en la tabla. Dimensiones AB=BD=DE=EK=b, donde b = 0,4 m.Tome la carga como punto material.
Despreciando la masa del eje, determine las reacciones del cojinete de empuje y el cojinete.




















