Zadané sú úlohy pre sadačsko-analytické a sadačsko-grafické práce na všetkých úsekoch kurzu technickej mechaniky. Každá úloha obsahuje popis riešenia úloh so stručnými usmerneniami, sú uvedené príklady riešenia. Prílohy obsahujú potrebný referenčný materiál. Pre študentov stavebných odborov stredných odborných škôl.
Stanovenie reakcií ideálnych väzieb analytickým spôsobom.
1. Označte bod, ktorého rovnováha sa uvažuje. V úlohách na samostatnú prácu je takýmto bodom ťažisko tela alebo priesečník všetkých tyčí a závitov.
2. Aplikujte aktívne sily na uvažovaný bod. V úlohách pre samostatnú prácu sú aktívnymi silami vlastná hmotnosť tela alebo hmotnosť bremena, ktoré smerujú nadol (správnejšie k ťažisku zeme). V prítomnosti bloku pôsobí hmotnosť bremena na uvažovaný bod pozdĺž závitu. Smer tejto sily je určený z výkresu. Telesná hmotnosť sa zvyčajne označuje písmenom G.
3. Mentálne vyraďte spojenia, nahraďte ich pôsobenie reakciami spojení. V navrhovaných problémoch sa používajú tri typy väzieb - ideálne hladká rovina, ideálne tuhé rovné tyče a ideálne pružné závity - ďalej len rovina, tyč a závit.
OBSAH
Predslov
Sekcia I. Samostatná a kontrolná práca
Kapitola 1. Teoretická mechanika. Statika
1.1. Analytické stanovenie reakcií ideálnej väzby
1.2. Stanovenie podperných reakcií nosníka na dvoch podperách pri pôsobení zvislých zaťažení
1.3. Určenie polohy ťažiska úseku
Kapitola 2. Pevnosť materiálov
2.1. Výber sekcií tyčí na základe sily
2.2. Určenie hlavných centrálnych momentov zotrvačnosti úseku
2.3. Vykresľovanie šmykových síl a ohybových momentov pre jednoduchý nosník
2.4. Stanovenie prípustnej hodnoty centrálnej tlakovej sily
Kapitola 3
3.1. Konštrukcia diagramov vnútorných síl pre najjednoduchší jednookruhový rám
3.2. Grafické určenie síl v priehradových prútoch zostrojením Maxwell-Cremonovho diagramu
3.3. Stanovenie lineárnych pohybov v najjednoduchších konzolových rámoch
3.4. Výpočet staticky neurčitého (spojitého) nosníka podľa rovnice troch momentov
Oddiel II. Osadné a grafické práce
Kapitola 4. Teoretická mechanika. Statika
4.1. Stanovenie síl v prútoch najjednoduchšieho konzolového krovu
4.2. Stanovenie podperných reakcií nosníka na dvoch podperách
4.3. Určenie polohy ťažiska úseku
Kapitola 5
5.1. Stanovenie síl v prútoch staticky neurčitej sústavy
5.2. Určenie hlavných momentov zotrvačnosti úseku
5.3. Výber prierezu nosníka z valcovaného I-nosníka
5.4. Výber sekcie centrálne stláčaného kompozitného regálu
Kapitola 6
6.1. Stanovenie síl v rezoch trojkĺbového oblúka
6.2. Grafické určenie síl v prútoch plochého krovu zostrojením Maxwellovho diagramu - Cremona
6.3. Výpočet staticky neurčitého rámca
6.4. Výpočet spojitého nosníka podľa rovnice troch momentov
Aplikácie
Bibliografia.
Stiahnite si zadarmo e-knihu vo vhodnom formáte, pozerajte a čítajte:
Stiahnite si knihu Zbierka úloh z technickej mechaniky, Setkov VI, 2003 - fileskachat.com, rýchle a bezplatné stiahnutie.
Stiahnite si pdf
Nižšie si môžete kúpiť túto knihu za najlepšiu zľavnenú cenu s doručením po celom Rusku.
Mnohí vysokoškoláci čelia určitým ťažkostiam, keď začnú v rámci štúdia vyučovať základné technické disciplíny, akými sú pevnosť materiálov a teoretická mechanika. Tento článok sa bude zaoberať jedným z týchto predmetov - takzvanou technickou mechanikou.
Technická mechanika je veda, ktorá študuje rôzne mechanizmy, ich syntézu a analýzu. V praxi to znamená spojenie troch disciplín – pevnosť materiálov, teoretická mechanika a časti strojov. Je výhodné, že každá vzdelávacia inštitúcia si sama vyberie, v akom pomere bude tieto kurzy vyučovať.
Podľa toho sú vo väčšine kontrolných prác úlohy rozdelené do troch blokov, ktoré je potrebné riešiť samostatne alebo spoločne. Uvažujme o najbežnejších úlohách.
Prvý oddiel. Teoretická mechanika
Z množstva problémov teoretickej mechaniky sa možno najčastejšie stretnúť s problémami zo sekcie kinematiky a statiky. Ide o úlohy týkajúce sa vyváženia plochého rámu, definície zákonov pohybu telies a kinematickej analýzy pákového mechanizmu.
Na vyriešenie problémov pre rovnováhu plochého rámu je potrebné použiť rovnicu rovnováhy pre plochý systém síl:
![]()
Súčet priemetov všetkých síl na súradnicové osi je rovný nule a súčet momentov všetkých síl k ľubovoľnému bodu je rovný nule. Spoločným riešením týchto rovníc určíme veľkosť reakcií všetkých podpier plochého rámu.
V úlohách na určenie hlavných kinematických parametrov pohybu telies je potrebné na základe danej trajektórie alebo zákona pohybu hmotného bodu určiť jeho rýchlosť, zrýchlenie (plné, tangenciálne a normálové) a polomer zakrivenie trajektórie. Zákonitosti pohybu bodu sú dané rovnicami trajektórie:
Priemet rýchlosti bodu na súradnicových osiach sa zistí diferenciáciou zodpovedajúcich rovníc:
![]()
Diferencovaním rýchlostných rovníc nájdeme projekcie zrýchlenia bodu. Tangenciálne a normálové zrýchlenie, polomer zakrivenia trajektórie sa zistí graficky alebo analyticky:
![]()
![]()
Kinematická analýza pákového mechanizmu sa vykonáva podľa nasledujúcej schémy:
- Rozdelenie mechanizmu do skupín Assur
- Konštrukcia pre každú zo skupín plánov pre rýchlosti a zrýchlenia
- Určenie rýchlostí a zrýchlení všetkých článkov a bodov mechanizmu.
Časť dva. Pevnosť materiálov
Sila materiálov je pomerne ťažko pochopiteľná časť s množstvom rôznych úloh, z ktorých väčšina je riešená podľa vlastnej metodiky. Aby sa študentom uľahčilo riešenie ich úloh, najčastejšie sa im v rámci aplikovanej mechaniky zadávajú elementárne úlohy na jednoduchú odolnosť konštrukcií - navyše typ a materiál konštrukcie spravidla závisí od profil univerzity.
Najčastejšími problémami sú napätie-stlačenie, ohnutie a krútenie.
Pri problémoch ťah-tlak je potrebné zostaviť diagramy pozdĺžnych síl a normálových napätí a niekedy aj posunov konštrukčných úsekov.
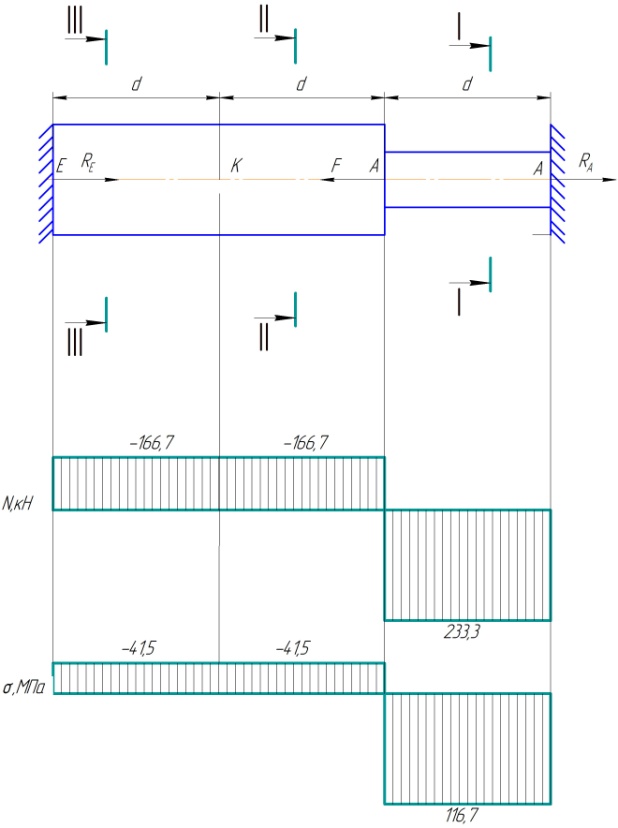
K tomu je potrebné rozdeliť štruktúru na úseky, ktorých hranicami budú miesta, kde pôsobí zaťaženie alebo sa mení plocha prierezu. Ďalej, použitím vzorcov pre rovnováhu pevného telesa, určíme hodnoty vnútorných síl na hraniciach sekcií a, berúc do úvahy plochu prierezu, vnútorné napätia.
Podľa získaných údajov zostavujeme grafy - diagramy, pričom za os grafu berieme os symetrie konštrukcie.
Problémy s krútením sú podobné problémom s ohybom, s výnimkou toho, že namiesto ťahových síl sú na telo aplikované krútiace momenty. S ohľadom na to je potrebné zopakovať kroky výpočtu - rozdelenie na sekcie, určenie momentov krútenia a uhlov krútenia a vykreslenie.
Pri úlohách ohybu je potrebné vypočítať a určiť priečne sily a ohybové momenty pre zaťažený nosník.
Najprv sa zistia reakcie podpier, v ktorých je nosník upevnený. Aby ste to dosiahli, musíte si zapísať rovnovážne rovnice konštrukcie, berúc do úvahy všetky pôsobiace sily.
Potom sa lúč rozdelí na časti, ktorých hranice budú miestami pôsobenia vonkajších síl. Posúdením rovnováhy každého úseku oddelene sa určia priečne sily a ohybové momenty na hraniciach úsekov. Na základe získaných údajov sa budujú parcely.
Skúška pevnosti v priereze sa vykonáva takto:
- Určí sa miesto nebezpečného úseku - úsek, kde budú pôsobiť najväčšie ohybové momenty.
- Z podmienky pevnosti v ohybe sa určí moment odporu prierezu nosníka.
- Určuje sa charakteristická veľkosť sekcie - priemer, dĺžka strany alebo číslo profilu.
Časť tri. Časti strojov
Časť "Podrobnosti o stroji" kombinuje všetky úlohy na výpočet mechanizmov, ktoré fungujú v reálnych podmienkach - môže to byť pohon dopravníka alebo ozubené koleso. Veľmi uľahčuje úlohu, že všetky vzorce a metódy výpočtu sú uvedené v referenčných knihách a študent si musí vybrať len tie, ktoré sú vhodné pre daný mechanizmus.
Literatúra
- Teoretická mechanika: Smernice a riadiace úlohy pre študentov externého štúdia technických, stavebných, dopravných, prístrojových odborov vysokých škôl / Ed. Prednášal prof. S. M. Targa, - M.: Vyššia škola, 1989. Štvrté vydanie;
- A. V. Darkov, G. S. Shpiro. "Sila materiálov";
- Chernavsky S.A. Návrh kurzu častí strojov: Proc. príručka pre študentov strojárskych odborov technických škôl / S. A. Chernavsky, K. N. Bokov, I. M. Chernin a i. - 2. vyd., preprac. a dodatočné - M. Mashinostroenie, 1988. - 416 s.: chor.
Riešenie technickej mechaniky na zákazku
Naša spoločnosť ponúka aj služby pri riešení problémov a testov v mechanike. Ak máte problém pochopiť túto tému, vždy si u nás môžete objednať podrobné riešenie. Berieme na seba ťažké úlohy!
môže byť zadarmo.
Teoretická mechanika- Ide o odvetvie mechaniky, ktoré stanovuje základné zákony mechanického pohybu a mechanickej interakcie hmotných telies.
Teoretická mechanika je veda, v ktorej sa skúmajú pohyby telies v čase (mechanické pohyby). Slúži ako základ pre ďalšie sekcie mechaniky (teória pružnosti, odolnosti materiálov, teória plasticity, teória mechanizmov a strojov, hydroaerodynamika) a mnohé technické disciplíny.
mechanický pohyb- ide o časovú zmenu relatívnej polohy v priestore hmotných telies.
Mechanická interakcia- je to taká interakcia, v dôsledku ktorej sa mení mechanický pohyb alebo sa mení vzájomná poloha častí tela.
Pevná statika tela
Statika- Ide o odvetvie teoretickej mechaniky, ktoré sa zaoberá problémami rovnováhy pevných telies a premenou jedného systému síl na iný, jemu ekvivalentný.
- Základné pojmy a zákony statiky
- Absolútne tuhé telo(pevné teleso, teleso) je hmotné teleso, vzdialenosť medzi akýmikoľvek bodmi sa nemení.
- Materiálny bod je teleso, ktorého rozmery podľa podmienok problému možno zanedbať.
- uvoľnené telo je teleso, na pohyb ktorého nie sú kladené žiadne obmedzenia.
- Nevoľné (viazané) telo je teleso, ktorého pohyb je obmedzený.
- Spojenia- sú to telesá, ktoré bránia pohybu uvažovaného objektu (telesa alebo sústavy telies).
- Komunikačná reakcia je sila, ktorá charakterizuje pôsobenie väzby na tuhé teleso. Ak silu, ktorou tuhé teleso pôsobí na väzbu, považujeme za akciu, potom je reakcia väzby protiakciou. V tomto prípade sa sila - pôsobenie aplikuje na spojenie a reakcia spojenia sa aplikuje na pevné teleso.
- mechanický systém je súbor vzájomne prepojených telies alebo hmotných bodov.
- Pevné možno považovať za mechanický systém, ktorého polohy a vzdialenosť medzi bodmi sa nemenia.
- sila je vektorová veličina charakterizujúca mechanické pôsobenie jedného hmotného telesa na druhé.
Sila ako vektor je charakterizovaná bodom pôsobenia, smerom pôsobenia a absolútnou hodnotou. Jednotkou merania modulu sily je Newton. - siločiara je priamka, pozdĺž ktorej smeruje vektor sily.
- Koncentrovaná sila je sila pôsobiaca v jednom bode.
- Rozložené sily (rozložené zaťaženie)- sú to sily pôsobiace na všetky body objemu, povrchu alebo dĺžky telesa.
Rozložené zaťaženie je dané silou pôsobiacou na jednotku objemu (plocha, dĺžka).
Rozmer rozloženého zaťaženia je N / m 3 (N / m 2, N / m). - Vonkajšia sila je sila pôsobiaca od telesa, ktorá nepatrí do uvažovaného mechanického systému.
- vnútorná sila je sila pôsobiaca na hmotný bod mechanického systému z iného hmotného bodu prislúchajúceho do posudzovaného systému.
- Silový systém je súhrn síl pôsobiacich na mechanický systém.
- Plochý systém síl je sústava síl, ktorých akčné línie ležia v rovnakej rovine.
- Priestorový systém síl je sústava síl, ktorých akčné línie neležia v rovnakej rovine.
- Systém konvergujúcich síl je sústava síl, ktorých akčné línie sa pretínajú v jednom bode.
- Svojvoľný systém síl je sústava síl, ktorých akčné línie sa nepretínajú v jednom bode.
- Ekvivalentné sústavy síl- sú to sústavy síl, ktorých výmena jedna za druhú nemení mechanický stav tela.
Akceptované označenie: . - Rovnováha Stav, v ktorom teleso pôsobením síl zostáva nehybné alebo sa pohybuje rovnomerne v priamom smere.
- Vyvážený systém síl- ide o sústavu síl, ktorá pri pôsobení na voľné pevné teleso nemení jeho mechanický stav (nevyvádza ho z rovnováhy).
 .
. - výsledná sila je sila, ktorej pôsobenie na teleso je ekvivalentné pôsobeniu sústavy síl.
 .
. - Moment sily je hodnota, ktorá charakterizuje rotačnú schopnosť sily.
- Mocenský pár je systém dvoch rovnobežných, v absolútnej hodnote rovnakých, opačne smerujúcich síl.
Akceptované označenie: .
Pôsobením niekoľkých síl telo vykoná rotačný pohyb. - Projekcia sily na osi- je to úsečka uzavretá medzi kolmicami vedenými od začiatku a konca vektora sily k tejto osi.
Projekcia je kladná, ak sa smer segmentu zhoduje s kladným smerom osi. - Projekcia sily na rovine je vektor v rovine uzavretej medzi kolmicami vedenými od začiatku a konca vektora sily k tejto rovine.
- Zákon 1 (zákon zotrvačnosti). Izolovaný hmotný bod je v pokoji alebo sa pohybuje rovnomerne a priamočiaro.
Rovnomerný a priamočiary pohyb hmotného bodu je pohyb zotrvačnosťou. Rovnovážny stav hmotného bodu a tuhého telesa sa chápe nielen ako stav pokoja, ale aj ako pohyb zotrvačnosťou. Pre tuhé teleso existujú rôzne typy zotrvačného pohybu, napríklad rovnomerné otáčanie tuhého telesa okolo pevnej osi. - Zákon 2. Pevné teleso je v rovnováhe pri pôsobení dvoch síl iba vtedy, ak sú tieto sily rovnako veľké a smerované v opačných smeroch pozdĺž spoločnej akčnej línie.
Tieto dve sily sa nazývajú vyvážené.
Vo všeobecnosti sa sily považujú za vyrovnané, ak je tuhé teleso, na ktoré tieto sily pôsobia, v pokoji. - Zákon 3. Bez narušenia stavu (slovo „stav“ tu znamená stav pohybu alebo pokoja) tuhého telesa je možné pridávať a odstraňovať vyrovnávacie sily.
Dôsledok. Bez narušenia stavu tuhého telesa môže byť sila prenesená pozdĺž svojej akčnej línie do akéhokoľvek bodu telesa.
Dva systémy síl sa nazývajú ekvivalentné, ak jeden z nich môže byť nahradený iným bez narušenia stavu tuhého telesa. - Zákon 4. Výslednica dvoch síl pôsobiacich v jednom bode pôsobí v tom istom bode, v absolútnej hodnote sa rovná uhlopriečke rovnobežníka postaveného na týchto silách a smeruje pozdĺž tohto
uhlopriečky.
Modul výsledku je: - Zákon 5 (zákon o rovnosti akcie a reakcie). Sily, ktorými na seba dve telesá pôsobia, sú rovnako veľké a smerujú v opačných smeroch pozdĺž jednej priamky.
Treba mať na pamäti, že akcie- sila pôsobiaca na telo B a opozície- sila pôsobiaca na telo ALE, nie sú vyvážené, pretože sú pripojené k rôznym telám. - Zákon 6 (zákon otužovania). Pri tuhnutí nie je narušená rovnováha nepevného telesa.
Netreba zabúdať, že rovnovážne podmienky, ktoré sú nevyhnutné a postačujúce pre tuhé teleso, sú nevyhnutné, ale nedostatočné pre zodpovedajúce netuhé teleso. - Zákon 7 (zákon o uvoľnení z dlhopisov). Nevoľné pevné teleso možno považovať za slobodné, ak je duševne oslobodené od väzieb, pričom pôsobenie väzieb nahrádza zodpovedajúcimi reakciami väzieb.
- Spojenia a ich reakcie
- Jemný povrch obmedzuje pohyb pozdĺž normály k nosnej ploche. Reakcia smeruje kolmo k povrchu.
- Kĺbová pohyblivá podpera obmedzuje pohyb tela pozdĺž normály k referenčnej rovine. Reakcia smeruje pozdĺž normály k povrchu nosiča.
- Kĺbová pevná podpera pôsobí proti akémukoľvek pohybu v rovine kolmej na os otáčania.
- Kĺbový beztiažový prút pôsobí proti pohybu tela pozdĺž línie tyče. Reakcia bude smerovať pozdĺž línie tyče.
- Slepé ukončenie pôsobí proti akémukoľvek pohybu a rotácii v rovine. Jeho pôsobenie môže byť nahradené silou prezentovanou vo forme dvoch zložiek a dvojice síl s momentom.




Kinematika
Kinematika- oddiel teoretickej mechaniky, ktorý uvažuje o všeobecných geometrických vlastnostiach mechanického pohybu, ako procesu prebiehajúceho v priestore a čase. Pohybujúce sa objekty sa považujú za geometrické body alebo geometrické telesá.
- Základné pojmy kinematiky
- Zákon pohybu bodu (telesa) je závislosť polohy bodu (telesa) v priestore od času.
- Bodová trajektória je ťažisko polôh bodu v priestore počas jeho pohybu.
- Bodová (telesná) rýchlosť- ide o charakteristiku zmeny polohy bodu (telesa) v priestore v čase.
- Bodové (telesné) zrýchlenie- ide o charakteristiku časovej zmeny rýchlosti bodu (telesa).
- Určenie kinematických charakteristík bodu
- Bodová trajektória
Vo vektorovom referenčnom systéme je trajektória opísaná výrazom: .
V súradnicovom referenčnom systéme je dráha určená podľa zákona o pohybe bodu a je opísaná výrazmi z = f(x,y) vo vesmíre, príp y = f(x)- v lietadle.
V prirodzenom referenčnom systéme je trajektória vopred určená. - Určenie rýchlosti bodu vo vektorovom súradnicovom systéme
Pri špecifikácii pohybu bodu vo vektorovom súradnicovom systéme sa pomer pohybu k časovému intervalu nazýva priemerná hodnota rýchlosti v tomto časovom intervale: .
Ak vezmeme časový interval ako nekonečne malú hodnotu, dostaneme hodnotu rýchlosti v danom čase (okamžitú hodnotu rýchlosti): .
.
Vektor priemernej rýchlosti smeruje pozdĺž vektora v smere pohybu bodu, vektor okamžitej rýchlosti smeruje tangenciálne k trajektórii v smere pohybu bodu.
záver: rýchlosť bodu je vektorová veličina rovnajúca sa derivácii pohybového zákona vzhľadom na čas.
Odvodená vlastnosť: časová derivácia akejkoľvek hodnoty určuje rýchlosť zmeny tejto hodnoty. - Určenie rýchlosti bodu v súradnicovom referenčnom systéme
Rýchlosť zmeny súradníc bodu: .
.
Modul plnej rýchlosti bodu s pravouhlým súradnicovým systémom sa bude rovnať: .
.
Smer vektora rýchlosti je určený kosínusom uhlov riadenia: ,
,
kde sú uhly medzi vektorom rýchlosti a súradnicovými osami. - Určenie rýchlosti bodu v prirodzenom referenčnom systéme
Rýchlosť bodu v prirodzenom referenčnom systéme je definovaná ako derivácia zákona o pohybe bodu: .
Podľa predchádzajúcich záverov je vektor rýchlosti nasmerovaný tangenciálne k trajektórii v smere pohybu bodu av osiach je určený iba jednou projekciou .
- Kinematika tuhého tela
- V kinematike tuhých telies sa riešia dva hlavné problémy:
1) úloha pohybu a určenie kinematických charakteristík tela ako celku;
2) určenie kinematických charakteristík bodov telesa. - Translačný pohyb tuhého telesa
Translačný pohyb je pohyb, pri ktorom priamka vedená dvoma bodmi tela zostáva rovnobežná s jeho pôvodnou polohou.
Veta: pri translačnom pohybe sa všetky body telesa pohybujú po rovnakých trajektóriách a v každom časovom okamihu majú rovnakú rýchlosť a zrýchlenie v absolútnej hodnote a smere.
záver: translačný pohyb tuhého telesa je určený pohybom ktoréhokoľvek z jeho bodov, a preto je úloha a štúdium jeho pohybu redukované na kinematiku bodu.. - Rotačný pohyb tuhého telesa okolo pevnej osi
Rotačný pohyb tuhého telesa okolo pevnej osi je pohyb tuhého telesa, pri ktorom dva body patriace telesu zostávajú nehybné počas celej doby pohybu.
Poloha tela je určená uhlom natočenia. Jednotkou merania uhla sú radiány. (Radián je stredový uhol kruhu, ktorého dĺžka oblúka sa rovná polomeru, celý uhol kruhu obsahuje 2π radián.)
Zákon rotačného pohybu telesa okolo pevnej osi.
Uhlová rýchlosť a uhlové zrýchlenie telesa budú určené metódou diferenciácie:
— uhlová rýchlosť, rad/s;
— uhlové zrýchlenie, rad/s².
Ak teleso prerežeme o rovinu kolmú na os, zvolíme bod na osi rotácie S a ľubovoľný bod M, potom bod M bude popisovať okolo bodu S polomerový kruh R. Počas dt existuje elementárna rotácia cez uhol , zatiaľ čo bod M sa bude pohybovať pozdĺž trajektórie na určitú vzdialenosť .
.
Modul lineárnej rýchlosti: .
.
bodové zrýchlenie M so známou trajektóriou je určená jej komponentmi: ,
,
kde .
.
V dôsledku toho dostaneme vzorce
tangenciálne zrýchlenie: ;
;
normálne zrýchlenie: .
.

Dynamika
Dynamika- Ide o odvetvie teoretickej mechaniky, ktoré študuje mechanické pohyby hmotných telies v závislosti od príčin, ktoré ich spôsobujú.
- Základné pojmy dynamiky
- zotrvačnosť- ide o vlastnosť hmotných telies udržiavať stav pokoja alebo rovnomerného priamočiareho pohybu, kým vonkajšie sily tento stav nezmenia.
- Hmotnosť je kvantitatívna miera zotrvačnosti telesa. Jednotkou hmotnosti je kilogram (kg).
- Materiálny bod je teleso s hmotnosťou, ktorej rozmery sa pri riešení tohto problému zanedbávajú.
- Ťažisko mechanického systému je geometrický bod, ktorého súradnice sú určené vzorcami:
kde m k, x k, y k, z k- hmotnosť a súradnice k- ten bod mechanického systému, m je hmotnosť systému.
V rovnomernom ťažisku sa poloha ťažiska zhoduje s polohou ťažiska. - Moment zotrvačnosti hmotného telesa okolo osi je kvantitatívna miera zotrvačnosti počas rotačného pohybu.
Moment zotrvačnosti hmotného bodu okolo osi sa rovná súčinu hmotnosti bodu a druhej mocniny vzdialenosti bodu od osi: .
.
Moment zotrvačnosti sústavy (telesa) okolo osi sa rovná aritmetickému súčtu momentov zotrvačnosti všetkých bodov:
- Zotrvačná sila hmotného bodu je vektorová veličina, ktorá sa v absolútnej hodnote rovná súčinu hmotnosti bodu a modulu zrýchlenia a smeruje opačne k vektoru zrýchlenia:
- Zotrvačná sila hmotného telesa je vektorová veličina, ktorá sa v absolútnej hodnote rovná súčinu hmotnosti tela a modulu zrýchlenia ťažiska telesa a smeruje opačne k vektoru zrýchlenia ťažiska: ,
kde je zrýchlenie ťažiska telesa. - Impulz elementárnej sily je vektorová veličina rovnajúca sa súčinu vektora sily o nekonečne malý časový interval dt:
.
Celkový impulz sily pre Δt sa rovná integrálu základných impulzov: .
. - Elementárna sila je skalár dA, rovný skalárnemu
Kinematika
Kinematika hmotného bodu
Určenie rýchlosti a zrýchlenia bodu podľa daných rovníc jeho pohybu
Dané: Pohybové rovnice bodu: x = 12 sin (πt/6), cm; y= 6 cos 2 (πt/6), cm.
Nastavte typ jeho trajektórie a pre časový okamih t = 1 s nájsť polohu bodu na trajektórii, jeho rýchlosť, plné, tangenciálne a normálové zrýchlenie, ako aj polomer zakrivenia trajektórie.
Translačný a rotačný pohyb tuhého telesa

Vzhľadom na to:
t = 2 s; r1 = 2 cm, R1 = 4 cm; r2 = 6 cm, R2 = 8 cm; r 3 \u003d 12 cm, R 3 \u003d 16 cm; s 5 \u003d t 3 - 6 t (cm).
Určte v čase t = 2 rýchlosti bodov A, C; uhlové zrýchlenie kolesa 3; zrýchlenie bodu B a zrýchlenie stojana 4.
Kinematická analýza plochého mechanizmu

Vzhľadom na to:
R1, R2, L, AB, coi.
Nájdite: ω 2 .

Plochý mechanizmus pozostáva z tyčí 1, 2, 3, 4 a posúvača E. Tyče sú spojené pomocou cylindrických pántov. Bod D sa nachádza v strede tyče AB.
Dané: ω 1 , ε 1 .
Nájdite: rýchlosti V A , V B , V D a V E ; uhlové rýchlosti ω 2, ω 3 a ω 4; zrýchlenie a B ; uhlové zrýchlenie ε AB spojnice AB; polohy okamžitých stredov rýchlostí P 2 a P 3 článkov 2 a 3 mechanizmu.
Určenie absolútnej rýchlosti a absolútneho zrýchlenia bodu

Obdĺžniková doska sa otáča okolo pevnej osi podľa zákona φ = 6 t 2 - 3 t 3. Kladný smer čítania uhla φ je na obrázkoch znázornený oblúkovou šípkou. Os otáčania OO 1 leží v rovine platne (doska sa otáča v priestore).
Bod M sa pohybuje po priamke BD pozdĺž dosky. Je daný zákon jej relatívneho pohybu, teda závislosť s = AM = 40 (t - 2 t 3) - 40(s - v centimetroch, t - v sekundách). Vzdialenosť b = 20 cm. Na obrázku je bod M zobrazený v polohe, kde s = AM > 0 (pre s< 0 bod M je na druhej strane bodu A).
Nájdite absolútnu rýchlosť a absolútne zrýchlenie bodu M v čase t 1 = 1 s.
Dynamika
Integrácia diferenciálnych rovníc pohybu hmotného bodu pri pôsobení premenných síl
Zaťaženie D s hmotnosťou m, ktoré dostalo počiatočnú rýchlosť V0 v bode A, sa pohybuje v zakrivenom potrubí ABC umiestnenom vo vertikálnej rovine. Na úseku AB, ktorého dĺžka je l, pôsobí na zaťaženie konštantná sila T (jej smer je znázornená na obrázku) a sila R odporu média (modul tejto sily je R = μV). 2 je vektor R nasmerovaný opačne k rýchlosti V zaťaženia).
Zaťaženie po dokončení svojho pohybu v úseku AB v bode B potrubia bez zmeny hodnoty jeho rýchlostného modulu prechádza do úseku BC. Na reze BC pôsobí na zaťaženie premenná sila F, ktorej priemet F x na os x je daný.
Vzhľadom na zaťaženie ako hmotný bod nájdite zákon jeho pohybu na reze BC, t.j. x = f(t), kde x = BD. Ignorujte trenie zaťaženia na potrubí.

Stiahnite si riešenie
Veta o zmene kinetickej energie mechanického systému
Mechanický systém pozostáva zo závažia 1 a 2, valcového valca 3, dvojstupňových kladiek 4 a 5. Telesá systému sú spojené závitmi navinutými na kladkách; úseky závitov sú rovnobežné s príslušnými rovinami. Valec (pevný homogénny valec) sa valí pozdĺž referenčnej roviny bez skĺznutia. Polomery krokov kladiek 4 a 5 sú v tomto poradí R4 = 0,3 m, r4 = 0,1 m, R5 = 0,2 m, r5 = 0,1 m Hmotnosť každej kladky sa považuje za rovnomerne rozloženú pozdĺž jej vonkajšieho okraja . Nosné roviny závaží 1 a 2 sú drsné, koeficient klzného trenia pre každé závažie je f = 0,1.
Pôsobením sily F, ktorej modul sa mení podľa zákona F = F(s), kde s je posunutie bodu jej pôsobenia, sa sústava začína pohybovať z pokojového stavu. Pri pohybe systému pôsobia na kladku 5 odporové sily, ktorých moment vzhľadom na os otáčania je konštantný a rovný M5.
Určte hodnotu uhlovej rýchlosti kladky 4 v momente, keď sa posunutie s bodu pôsobenia sily F rovná s 1 = 1,2 m. 
Stiahnite si riešenie
Aplikácia všeobecnej rovnice dynamiky na štúdium pohybu mechanického systému
Pre mechanický systém určite lineárne zrýchlenie a 1 . Zvážte, že pre bloky a valčeky sú hmoty rozložené pozdĺž vonkajšieho polomeru. Káble a pásy sa považujú za beztiažové a neroztiahnuteľné; nedochádza k šmyku. Ignorujte valivé a posuvné trenie. 
Stiahnite si riešenie
Aplikácia d'Alembertovho princípu na stanovenie reakcií podpier rotujúceho telesa
Vertikálny hriadeľ AK, ktorý sa rovnomerne otáča uhlovou rýchlosťou ω = 10 s -1, je upevnený axiálnym ložiskom v bode A a valcovým ložiskom v bode D.
Na hriadeli je pevne pripevnená beztiažová tyč 1 s dĺžkou l 1 = 0,3 m, na ktorej voľnom konci je bremeno s hmotnosťou m 1 = 4 kg a homogénna tyč 2 s dĺžkou l 2 = 0,6 m, s hmotnosťou m 2 = 8 kg. Obe tyče ležia v rovnakej vertikálnej rovine. Body pripevnenia tyčí k hriadeľu, ako aj uhly α a β sú uvedené v tabuľke. Rozmery AB=BD=DE=EK=b, kde b = 0,4 m.. Berte zaťaženie ako bod materiálu.
Pri zanedbaní hmotnosti hriadeľa určite reakcie axiálneho ložiska a ložiska.




















