Për të çmontuar servo makinën tonë na duhet një kaçavidë. Sepse Unë jam duke çmontuar një servo drive shumë të vogël, kështu që më duhet një kaçavidë përkatëse. Personalisht, unë përdor kaçavida nga një grup i lirë kinez. E bleva në një kioskë në kalimin nëntokësor për rreth 5 dollarë, kështu që nuk është shumë e shtrenjtë.
Për të hapur servo diskun ju duhet vetëm të hiqni katër vida. Ato janë të vendosura në kapakun e poshtëm. Zhvidhos:

Duke hequr kapakun, mund të ekzaminoni njësinë e kontrollit. Nuk do të hyj në detaje, gjithsesi do ta heq nga këtu. Ju gjithashtu mund të shihni motorin në të cilin çojnë dy tela.

Sipër ka edhe një mbulesë, pas heqjes së të cilit shihen marshet e kutisë së marsheve. Vlen të përmendet se dy prej tyre janë bashkangjitur në potenciometër - kjo është mjaft e rëndësishme, pasi në mënyrë që kutia e ingranazhit të vazhdojë të kryejë funksionin e saj, do të duhet të thyejmë potenciometrin - thjesht do ta përdorim atë si një bosht për ingranazhet.

Në fakt, ju duhet të hiqni të gjitha ingranazhet nga servo drive dhe t'i lini mënjanë për një kohë. Ne nxjerrim potenciometrin (nga rruga, është gjithashtu një rezistencë e ndryshueshme) nga strehimi duke e shtyrë me kujdes nga pjesa e poshtme e servo me një kaçavidë.

Tani, në fakt, ka ardhur momenti i pakthimit. Sigurisht, gjithmonë do të jetë e mundur të bashkoni gjithçka përsëri së bashku, por kjo është më e vështirë. Pra - potenciometri kafshon.

Pastaj, duke përdorur të njëjtën metodë, ne ndajmë bordin e kontrollit me tela të energjisë dhe sinjalit.

Pastaj i kafshojmë telat nga motori. Kini kujdes këtu dhe mos i kafshoni kontaktet nga vetë motori - nëse nuk jeni të sigurt, është më mirë ta lini telin me një rezervë. Pastaj mund të shkrihet. E kafshoj telin deri te kontakti.


Le të bëjmë një inventar.

Gjithçka duket se është në vend. Tani le të marrim potenciometrin tonë.

Fakti është se tani ai gjithashtu rrotullohet vetëm në një kënd të caktuar. Dhe meqenëse është boshti dhe në të është ngjitur ingranazhi më i madh, mbi të cilin do të lidhim rrotën më vonë, duhet të sigurohemi që ajo të rrotullohet vazhdimisht. Ne nxjerrim dy pllaka metalike që e pengojnë këtë. Ne marrim:

Shpresoj që fotografia të tregojë atë që kam bërë. E grisa me pincë të vogla, pasi nuk kishte asgjë më të përshtatshme në dorë.
Tani ju duhet të prisni kufizuesin në vetë ingranazhin. Duket si një zgjatje nga fundi i ingranazhit. Është e lehtë për t'u gjetur, duket kështu.

E kemi prerë.

Dhe pas kësaj, mund të filloni të montoni kutinë e marsheve përsëri në strehim. Fusim mbrapsht boshtin që kemi bërë më parë nga potenciometri.

Më pas, një ingranazh në një kohë, duke filluar nga më i vogli. Kini kujdes kur vendosni ingranazhin e fundit - ai është i lidhur posaçërisht në boshtin e potenciometrit të mëparshëm, pasi maja e boshtit është bërë në formën e një shkronje. D. Kjo zgjatje duhet të futet në prerjen e ingranazhit. Rezulton diçka e ngjashme me foton e mëposhtme.

Ne vendosim kapakun e sipërm në kutinë e marsheve në mënyrë që të mos shpërbëhet gjatë punës së mëtejshme.

Epo, nuk ka mbetur shumë. Marrim telin me lidhësin që e kemi hequr më parë nga bordi dhe ndajmë telat në të. Ju nuk duhet t'i ndani ato në një distancë të gjatë; në fakt, një centimetër është mjaft i mjaftueshëm.

Ne pastrojmë dy prej tyre (në thelb çdo, por kam përdorur të kuqe dhe jeshile). Mjafton të prisni rreth 3 mm izolim. Për qëllimet tona - më shumë se.

Ne thjesht përkulim telin e mbetur të pazhveshur në mënyrë që të mos na ndërhyjë.

Le të kalojmë te gjërat e nxehta. Është koha për të ngrohur hekurin e saldimit. Ndërsa hekuri i saldimit po nxehej, e bëra më të rehatshme servo drive në dorezë.


Gjëja e parë që duhet të bëjmë është të heqim mbetjet e saldimit të vjetër që mbeten në kontaktet e motorit. Unë e bëj këtë duke përdorur një pompë shkrirjeje, pasi kam ngrohur paraprakisht kontaktin me një hekur saldimi në një gjendje të tillë që saldimi të shkrihet. Gjëja kryesore këtu është të mos e teproni - mbulesa e pasme e motorit është ende plastike dhe nuk i pëlqen të ngrohet për një kohë të gjatë. Procesi duket diçka si ky:


E kuptoj që mund të mos jetë shumë e dukshme ajo që bëra, por praktikisht nuk kishte mbetur asnjë saldim në kontaktet, gjë që doja.

Ka artikuj te mrekullueshem per saldimin ne DI HALT.Ai eshte ne pergjithesi nje gjeni me duket mua.Link me blogun e tij, ne fakt ka shume gjera pervec saldimit, mjafton te kerkosh.
Me pak fjalë, për të bërë një saldim të mirë, së pari duhet të heqësh qafe saldimin e vjetër.
Kanë mbetur dy tela për t'u bashkuar. Kushdo që është i njohur me saldimin mund ta bëjë atë në 5 sekonda. Për dikë si unë që normalisht mori një hekur saldimi për herë të dytë në jetën time, do t'i duhet pak më shumë kohë, por megjithatë - është shumë e thjeshtë, kushdo mund ta bëjë atë.
Gjatë bashkimit, unë përdor fluks, i cili, pa dyshim, e bën punën shumë më të lehtë dhe cilësia e saldimit është shumë më e lehtë për t'u siguruar me të. Personalisht, me këshillën e DI HALT-it, tashmë u dashurova me LTI-120 në blogun e tij, e kam në një kavanoz kaq në modë me furçë.

Shtrëngoni katër vidhat.

Kjo është e gjitha, modifikimi i servo ka mbaruar. Pasi ta keni rilidhur servo diskun në mënyrë më të rehatshme dhe më të fortë në dorezë, mund të filloni testimin.

Këtë herë nuk do të pëlqej kontrolluesin, por thjesht do të aplikoj tension 5V nga furnizimi me energji elektrike në telat e gjelbër dhe të kuq. Kujdes, në video ka një tingull mjaft të lartë nga disku.
Siç mund ta shihni, tani asgjë nuk e pengon shërbimin tonë të rrotullohet pa u ndalur. Tingulli i prodhuar nga disku në fakt nuk është i qetë, por në parim është i tolerueshëm. Kjo është ndoshta e gjitha për sot.
Ky artikull diskuton servos: dizajnin e tyre, qëllimin, këshilla për lidhjen dhe kontrollin, llojet e servove dhe krahasimin e tyre. Le të shkojmë përpara dhe të fillojmë me atë që është një servo.
Koncepti i servo
Një servo drive më së shpeshti kuptohet si një mekanizëm me një motor elektrik, të cilit mund t'i kërkohet të kthehet në një kënd të caktuar dhe të mbajë këtë pozicion. Megjithatë, ky nuk është një përkufizim plotësisht i plotë.
Për të qenë më të saktë, një servo drive është një makinë e kontrolluar përmes reagimeve negative, duke lejuar kontroll të saktë të parametrave të lëvizjes. Një servo drive është çdo lloj disku mekanik që përmban një sensor (pozicion, shpejtësi, forcë, etj.) dhe një njësi kontrolli të njësisë që ruan automatikisht parametrat e nevojshëm në sensor dhe pajisje sipas një vlere të jashtme të caktuar.
Me fjale te tjera:
Servo drive merr vlerën e parametrit të kontrollit si hyrje. Për shembull, këndi i rrotullimit.
Njësia e kontrollit e krahason këtë vlerë me vlerën në sensorin e saj.
Bazuar në rezultatin e krahasimit, disku kryen disa veprime: për shembull, duke u kthyer, përshpejtuar ose ngadalësuar në mënyrë që vlera nga sensori i brendshëm të bëhet sa më afër vlerës së parametrit të kontrollit të jashtëm.
Më të zakonshmet janë servot që mbajnë një kënd të caktuar dhe servot që mbajnë një shpejtësi të caktuar rrotullimi.
Një servo tipike hobi është paraqitur më poshtë.
Si janë projektuar servot?
Pajisje servo drive
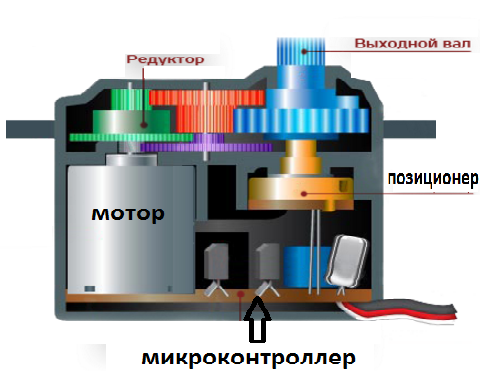
Servo disqet kanë disa komponentë.

Drive - motor elektrik me kuti shpejtësie. Për të kthyer energjinë elektrike në rrotullim mekanik, ju duhet motor elektrik. Megjithatë, shpejtësia e rrotullimit të motorit është shpesh shumë e lartë për përdorim praktik. Përdoret për të ulur shpejtësinë kuti ingranazhi: një mekanizëm ingranazhi që transmeton dhe konverton çift rrotullues.
Duke ndezur dhe fikur motorin elektrik, ne mund të rrotullojmë boshtin e daljes - ingranazhin përfundimtar të servo, të cilit mund t'i bashkojmë diçka që duam të kontrollojmë. Megjithatë, në mënyrë që pozicioni të kontrollohet nga pajisja, është e nevojshme sensori i reagimit - kodues, i cili do ta kthejë këndin e rrotullimit përsëri në një sinjal elektrik. Për këtë shpesh përdoret një potenciometër. Kur rrotulloni rrëshqitësin e potenciometrit, rezistenca e tij ndryshon, në përpjesëtim me këndin e rrotullimit. Kështu, mund të përdoret për të përcaktuar pozicionin aktual të mekanizmit.
Përveç motorit elektrik, kutisë së marsheve dhe potenciometrit, servo drive ka komponentë elektronikë që janë përgjegjës për marrjen e një parametri të jashtëm, leximin e vlerave nga potenciometri, krahasimin e tyre dhe ndezjen/fikjen e motorit. Ajo është përgjegjëse për mbajtjen e reagimeve negative.
Ka tre tela që shkojnë në servo. Dy prej tyre janë përgjegjës për fuqizimin e motorit, i treti jep një sinjal kontrolli, i cili përdoret për të vendosur pozicionin e pajisjes.
Tani le të shohim se si të kontrollojmë një servo nga jashtë.
Kontrolli i servo drive. Ndërfaqja e sinjalit të kontrollit
Për të treguar pozicionin e dëshiruar në servomotor, duhet të dërgohet një sinjal kontrolli përgjatë telit të parashikuar për këtë qëllim. Sinjali i kontrollit është impulse me frekuencë konstante dhe gjerësi të ndryshueshme.

Çfarë pozicioni duhet të marrë servo varet nga gjatësia e pulseve. Kur një sinjal hyn në qarkun e kontrollit, gjeneratori i pulsit i pranishëm në të prodhon pulsin e tij, kohëzgjatja e të cilit përcaktohet përmes një potenciometri. Pjesa tjetër e qarkut krahason kohëzgjatjen e dy pulseve. Nëse kohëzgjatja është e ndryshme, motori elektrik ndizet. Drejtimi i rrotullimit përcaktohet nga cili prej pulseve është më i shkurtër. Nëse gjatësia e pulsit është e barabartë, motori elektrik ndalon.
Më shpesh, serverët hobi prodhojnë impulse me një frekuencë prej 50 Hz. Kjo do të thotë që një impuls emetohet dhe merret një herë në 20 ms. Në mënyrë tipike, një kohëzgjatje pulsi prej 1520 µs do të thotë që servo duhet të marrë pozicionin e mesit. Rritja ose zvogëlimi i gjatësisë së pulsit do të bëjë që servo të kthehet përkatësisht në drejtim të akrepave të orës ose në të kundërt. Në këtë rast, ka kufij të sipërm dhe të poshtëm në kohëzgjatjen e pulsit. Në bibliotekën Servo për Arduino, gjatësitë e mëposhtme të impulseve janë caktuar si parazgjedhje: 544 μs për 0° dhe 2400 μs për 180°.
Ju lutemi vini re se pajisja juaj specifike mund të mos ketë cilësime të paracaktuara nga fabrika. Disa servo përdorin një gjerësi pulsi prej 760 µs. Pozicioni i mesëm korrespondon me 760 μs, ngjashëm me mënyrën se si në servo konvencionale pozicioni i mesit korrespondon me 1520 μs.
Vlen gjithashtu të përmendet se këto janë vetëm gjatësi të pranuara përgjithësisht. Edhe brenda të njëjtit model servo, mund të ketë toleranca prodhuese që bëjnë që diapazoni i funksionimit të gjatësisë së pulsit të ndryshojë pak. Për funksionim të saktë, çdo servo specifike duhet të kalibrohet: përmes eksperimentimit, është e nevojshme të zgjidhni gamën e saktë specifike për të.
Diçka tjetër që ia vlen t'i kushtohet vëmendje është konfuzioni në terminologji. Shpesh metoda e kontrollit të servove quhet PWM/PWM (Pulse Width Modulation) ose PPM (Pulse Position Modulation). Kjo nuk është e vërtetë dhe përdorimi i këtyre metodave mund të dëmtojë edhe diskun. Termi i saktë është PDM (Pulse Duration Modulation). Në të, gjatësia e pulseve është jashtëzakonisht e rëndësishme dhe shpeshtësia e shfaqjes së tyre nuk është aq e rëndësishme. 50 Hz është normale, por servo do të funksionojë si duhet në 40 dhe 60 Hz. E vetmja gjë që duhet të keni parasysh është se nëse frekuenca zvogëlohet shumë, ajo mund të funksionojë në mënyrë të vrullshme dhe me fuqi të reduktuar, dhe nëse frekuenca rritet shumë (për shembull, 100 Hz), ajo mund të mbinxehet dhe të dështojë.
Karakteristikat e Servo Drive
Tani le të kuptojmë se cilat lloje të servove ekzistojnë dhe cilat karakteristika kanë.
Çift rrotullues dhe shpejtësia e lëkundjes
Së pari le të flasim për dy karakteristika shumë të rëndësishme të një servo drive: o çift rrotullues dhe rreth shpejtësia e rrotullimit.
Momenti i forcës, ose çift rrotullimi, është një sasi fizike vektoriale e barabartë me produktin e vektorit të rrezes të tërhequr nga boshti i rrotullimit deri në pikën e aplikimit të forcës dhe vektorit të kësaj force. Karakterizon veprimin rrotullues të një force mbi një trup të ngurtë.

E thënë thjesht, kjo karakteristikë tregon se sa ngarkesë mund të mbajë servo në pushim në një levë të një gjatësi të caktuar. Nëse çift rrotullimi i servo drive është 5 kg×cm, atëherë kjo do të thotë se servo drive do të mbajë një levë 1 cm të gjatë, në skajin e lirë të së cilës është pezulluar 5 kg, në një pozicion horizontal. Ose, në të njëjtën mënyrë, një levë 5 cm e gjatë nga e cila është pezulluar 1 kg.
Shpejtësia e servo matet me sasinë e kohës që duhet që krahu i servo të rrotullohet 60°. Një karakteristikë prej 0,1 s/60° do të thotë që servo rrotullohet 60° në 0,1 s. Prej saj është e lehtë të llogaritet shpejtësia në një vlerë më të njohur, rrotullime në minutë, por ndodh që kur përshkruhen servo, një njësi e tillë përdoret më shpesh.
Vlen të përmendet se ndonjëherë ka një shkëmbim midis këtyre dy karakteristikave, pasi nëse duam një servo të besueshëm, të rëndë, duhet të përgatitemi që kjo njësi e fuqishme të kthehet ngadalë. Dhe nëse duam një makinë shumë të shpejtë, atëherë do të jetë relativisht e lehtë ta largojmë atë nga pozicioni i ekuilibrit. Kur përdorni të njëjtin motor, ekuilibri përcaktohet nga konfigurimi i ingranazheve në kutinë e marsheve.
Sigurisht, ne gjithmonë mund të marrim një njësi që konsumon më shumë energji, gjëja kryesore është që karakteristikat e saj të plotësojnë nevojat tona.
Faktor formë
Servos ndryshojnë në madhësi. Dhe megjithëse nuk ka asnjë klasifikim zyrtar, prodhuesit i janë përmbajtur prej kohësh disa madhësive me një rregullim përgjithësisht të pranuar të lidhësve. Ato mund të ndahen në:
i vogël
standarde
Ato kanë këto dimensione karakteristike:
Ka edhe servo të ashtuquajtur “special” me dimensione që nuk bëjnë pjesë në këtë klasifikim, por përqindja e servove të tilla është shumë e vogël.
Ndërfaqja e brendshme
Servo disqet janë ose analoge ose dixhitale. Pra, cilat janë dallimet, avantazhet dhe disavantazhet e tyre?
Nga jashtë, ato nuk janë të ndryshme: motorët elektrikë, kuti ingranazhesh, potenciometrat janë të njëjtë, ato ndryshojnë vetëm në elektronikën e kontrollit të brendshëm. Në vend të një mikroqarku special analog servo, homologu dixhital ka një mikroprocesor në tabelë që merr impulse, i analizon ato dhe kontrollon motorin. Kështu, në dizajnin fizik, ndryshimi i vetëm është në metodën e përpunimit të impulseve dhe kontrollit të motorit.

Të dy llojet e servo drive pranojnë të njëjtat impulse kontrolli. Servo analog më pas vendos nëse do të ndryshojë pozicionin dhe i dërgon një sinjal motorit nëse është e nevojshme. Kjo zakonisht ndodh me një frekuencë prej 50 Hz. Kështu, marrim 20 ms - koha minimale e reagimit. Në këtë kohë, çdo ndikim i jashtëm mund të ndryshojë pozicionin e servo drive. Por ky nuk është problemi i vetëm. Në pushim, asnjë tension nuk aplikohet në motorin elektrik; në rast të një devijimi të lehtë nga ekuilibri, një sinjal i shkurtër me fuqi të ulët i dërgohet motorit elektrik. Sa më i madh të jetë devijimi, aq më i fortë është sinjali. Kështu, me devijime të vogla, servo drive nuk do të jetë në gjendje të rrotullojë shpejt motorin ose të zhvillojë një çift rrotullues të madh. "Zonat e vdekura" formohen në kohë dhe distancë.
Këto probleme mund të zgjidhen duke rritur frekuencën e marrjes, përpunimin e sinjalit dhe kontrollin e motorit elektrik. Servos dixhitale përdorin një procesor të veçantë që merr pulset e kontrollit, i përpunon ato dhe i dërgon sinjale motorit me një frekuencë prej 200 Hz ose më shumë. Rezulton se servo disku dixhital është në gjendje të reagojë më shpejt ndaj ndikimeve të jashtme, të zhvillojë shpejt shpejtësinë dhe çift rrotullues të kërkuar, që do të thotë se është më mirë të mbash një pozicion të caktuar, gjë që është e mirë. Sigurisht që konsumon edhe më shumë energji elektrike. Gjithashtu, servot dixhitale janë më të vështira për t'u prodhuar dhe për këtë arsye kushtojnë dukshëm më shumë. Në fakt, këto dy disavantazhe janë të gjitha disavantazhet që kanë servot dixhitale. Në aspektin teknik, ata mposhtin pa kushte servo analoge.
Materialet e ingranazheve
Ingranazhet për servo vijnë nga materiale të ndryshme: plastika, karboni, metali. Të gjitha ato përdoren gjerësisht, zgjedhja varet nga aplikacioni specifik dhe cilat karakteristika kërkohen në instalim.

Ingranazhet plastike, më shpesh najloni, janë shumë të lehta, nuk i nënshtrohen konsumit dhe janë më të zakonshmet në servo. Ata nuk i rezistojnë ngarkesave të rënda, por nëse ngarkesat pritet të jenë të lehta, atëherë ingranazhet prej najloni janë zgjidhja më e mirë.
Ingranazhet e karbonit janë më të qëndrueshme, praktikisht nuk konsumohen dhe janë disa herë më të forta se ato najloni. Disavantazhi kryesor është kostoja e lartë.
Ingranazhet metalike janë më të rëndat, por ato mund të përballojnë ngarkesat maksimale. Ata konsumohen mjaft shpejt, kështu që ju duhet të ndryshoni marshin pothuajse çdo sezon. Ingranazhet e titanit janë më të preferuarat në mesin e ingranazheve metalike, si për nga karakteristikat teknike ashtu edhe për nga çmimi. Fatkeqësisht, ato do t'ju kushtojnë shumë.
Motorë të krehur dhe pa furça
Ekzistojnë tre lloje të servo motorëve: motor me bërthamë të rregullt, motor pa bërthamë dhe motor pa furça.

Një motor konvencional me bërthamë (djathtas) ka një rotor të dendur hekuri me një mbështjellje teli dhe magnet rreth tij. Rotori ka seksione të shumta, kështu që kur motori rrotullohet, rotori bën që motori të dridhet pak ndërsa seksionet kalojnë magnetet, duke rezultuar në një servo që vibron dhe është më pak i saktë se një servo me një motor pa bërthamë. Motori me rotor të zbrazët (majtas) ka një bërthamë të vetme magnetike me një cilindër ose dredha-dredha në formë zile rreth magnetit. Dizajni pa bërthamë është më i lehtë në peshë dhe nuk ka seksione, duke rezultuar në reagim më të shpejtë dhe funksionim të qetë dhe pa dridhje. Këta motorë janë më të shtrenjtë, por ato ofrojnë një nivel më të lartë kontrolli, çift rrotullues dhe shpejtësie në krahasim me ato standarde.

Servo disqet me motorë pa furça janë shfaqur relativisht kohët e fundit. Përparësitë janë të njëjta me ato të motorëve të tjerë pa furça: nuk ka furça, që do të thotë se nuk krijojnë rezistencë rrotulluese dhe nuk konsumohen, shpejtësia dhe çift rrotullimi janë më të larta me një konsum aktual të barabartë me motorët e krehur. Servot e motorëve pa furça janë servot më të shtrenjtë, por ato ofrojnë performancë më të mirë sesa servot me lloje të tjera motorësh.
Lidhja me Arduino
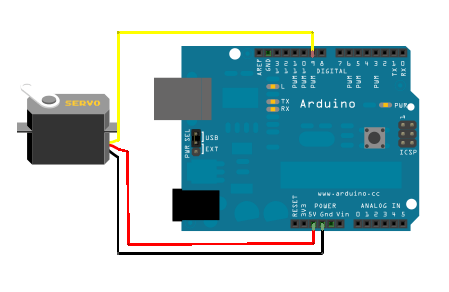
Shumë servo mund të lidhen drejtpërdrejt me Arduino. Për ta bërë këtë, një lak prej tre telash vjen prej tyre:
e kuqe - të ushqyerit; lidhet me pinin 5V ose direkt me furnizimin me energji elektrike
kafe ose e zezë - tokë
e verdhë ose e bardhë - sinjal; lidhet me daljen dixhitale Arduino.
Për t'u lidhur me Arduino, do të jetë e përshtatshme të përdorni një tabelë zgjeruese të portit, siç është Troyka Shield. Edhe pse me disa tela shtesë mund ta lidhni servon nëpërmjet tabelës së bukës ose direkt me kunjat Arduino.
Është e mundur të gjeneroni vetë impulse kontrolli, por kjo është një detyrë kaq e zakonshme sa ekziston një bibliotekë standarde Servo për ta thjeshtuar atë.
Kufizimet dietike
Një servo makinë tipike hobi konsumon më shumë se 100 mA gjatë funksionimit. Në të njëjtën kohë, Arduino është në gjendje të japë deri në 500 mA. Prandaj, nëse keni nevojë të përdorni një servo të fuqishme në një projekt, ka kuptim të mendoni për ndarjen e tij në një qark me fuqi shtesë.
Le të shohim shembullin e lidhjes së një servo drive 12V: 
Kufizimi në numrin e servove të lidhur
Në shumicën e tabelave Arduino, biblioteka Servo mbështet kontrollin e një maksimumi 12 servo; në Arduino Mega, ky numër rritet në 48. Megjithatë, ka një efekt të vogël anësor nga përdorimi i kësaj biblioteke: nëse nuk jeni duke punuar me një Arduino Mega , atëherë bëhet e pamundur përdorimi i funksionit analogWrite() në 9 dhe 10 kunja, pavarësisht nëse servos janë të lidhur me këto kunja apo jo. Në Arduino Mega mund të lidhim deri në 12 servo pa ndërprerë funksionalitetin PWM/PWM, nëse përdorim më shumë servo nuk do të mund të përdorim analogWrite() në kunjat 11 dhe 12.
Funksionaliteti i bibliotekës servo
Biblioteka Servo lejon kontrollin e softuerit të servove. Për këtë krijohet një variabël i tipit Servo. Menaxhimi kryhet nga funksionet e mëposhtme:
attach() - bashkëngjit një variabël në një pin specifik. Ekzistojnë dy opsione sintaksore për këtë funksion: servo.attach(pin) dhe servo.attach(pin, min, max) . Në këtë rast, pin është numri i kunjit me të cilin është lidhur servo drive, min dhe max janë gjatësia e pulsit në mikrosekonda, përgjegjëse për këndet e rrotullimit prej 0° dhe 180°. Si parazgjedhje, ato janë vendosur respektivisht në 544 μs dhe 2400 μs.
write() - urdhëron servo të pranojë disa vlera parametri. Sintaksa është: servo.write(kënd) ku këndi është këndi nëpër të cilin duhet të kalojë servo.
writeMicroseconds() - jep një komandë për të dërguar një puls me një gjatësi të caktuar në servo drive; është një analog i nivelit të ulët të komandës së mëparshme. Sintaksa është: servo.writeMicroseconds(uS), ku uS është gjatësia e pulsit në mikrosekonda.
read() - lexon vlerën aktuale të këndit në të cilin ndodhet servo. Sintaksa është: servo.read(), duke kthyer një vlerë të plotë midis 0 dhe 180.
attached() - kontrollon nëse një variabël është bashkangjitur në një pin specifik. Sintaksa është si më poshtë: servo.attached() , duke e kthyer logjikën e vërtetë nëse ndryshorja është bashkangjitur në ndonjë pin, përndryshe false.
detach() - kryen veprimin e kundërt të attach() , pra shkëput variablin nga pini të cilit i është caktuar. Sintaksa është: servo.detach() .
Të gjitha metodat e bibliotekës Servo2 janë të njëjta me metodat Servo.
Shembull i përdorimit të bibliotekës Servo
Në vend të një përfundimi
Servo disqet janë të ndryshëm, disa janë më të mirë - të tjerët janë më të lirë, disa janë më të besueshëm - të tjerët janë më të saktë. Dhe para se të blini një servo, ia vlen të keni parasysh se ai mund të mos ketë karakteristikat më të mira, për sa kohë që është i përshtatshëm për projektin tuaj. Fat i mirë në përpjekjet tuaja!
Robotët më të thjeshtë janë me 2 rrota ose me 4 rrota. Një robot i tillë mund të bazohet në një shasi nga një makinë e kontrolluar me radio, por jo të gjithë mund ta kenë në dorë ose mund të jetë turp ta shpërdorosh atë. Ju gjithashtu mund ta bëni vetë shasinë, por vendosja e rrotave direkt në motor nuk është një zgjidhje shumë e mirë; motori duhet të ngadalësojë, gjë që kërkon një kuti ingranazhi. Marrja e një shasie ose kuti ingranazhi të gatshëm, ose një motor me kuti ingranazhi, doli të mos ishte një detyrë aq e lehtë, ndryshe nga servot. Pothuajse çdo servo drive mund të shndërrohet lehtësisht në një motor me një kuti ingranazhi.
Rrotat mund të ngjiten drejtpërdrejt në rrotulluesin e një motori të tillë, dhe trupi i servo është i përshtatshëm për montim.
KUJDES! Dizajni i servove të tjera mund të ndryshojë, dhe për këtë arsye, ky manual është vetëm i pjesshëm.
Servo më e thjeshtë dhe më e lirë u mor si bazë:

Së pari, le ta ndajmë atë.

Së pari, heqim elektronikën e panevojshme, kafshojmë drejtuesin dhe kontrollojmë drejtpërdrejt motorin. Tjetra, le të vazhdojmë të modifikojmë mekanikën, të heqim marshin e parë me boshtin e jashtëm dhe të heqim ndalesën e udhëtimit prej saj.



Ne nxjerrim rezistencën dhe kafshojmë kufizuesin e vendosur në trupin e tij.

Ne i bashkojmë të gjithë mekanikët dhe kontrollojmë që gjithçka të lëvizë mirë.
Hapi tjetër është bashkimi i telit me motorin.

Ne montojmë shërbimin e mëparshëm në një motor të ri me një kuti ingranazhi.
Gjithçka është gati, nëse nuk keni bërë asnjë gabim, mund të shijoni punën tuaj.
Servos zakonisht kanë një kënd të kufizuar rrotullimi prej 180 gradë. Në këtë rast, ne do të shqyrtojmë një servo "të modifikuar" me një kënd rrotullimi të pakufizuar të boshtit. 
Karakteristikat e performancës nga faqja e shitësit
Madhësia: 40*20*37.5+5 mm bosht lëvizës
pesha: 38 g
gjatësia e telit: 320 mm
Shpejtësia: 0,19 sek/60 gradë (4,8 V)
0,22 sek/60 gradë (6 V)
shpejtësitë ka shumë të ngjarë të jenë të përziera, servo duhet të jetë më i shpejtë me 6 volt
çift rrotullues: 5 kg. cm. në (4,8 V)
5,5 kg.cm.at (6 V)
tension: 4.8V-6V
Set standard i dorëzimit 
4 karrige lëkundëse të formave të ndryshme
4 tufa, 4 amortizues gome dhe 4 vida për ngjitjen e servo
dhe një vidë tjetër e vogël për ngjitjen e lëkundësit në bosht iku nga fotografia :)
Pamja ngjall besim, prekja është gjithashtu në rregull, bllokimet e vogla të derdhjes janë vetëm në zonën e veshëve të montimit, ngjitësi aplikohet pak shtrembër (një tautologji, po!). Teli është i butë, lidhësi përshtatet mirë në kunjat. 
Epo, tani autopsia:
Kush nuk e dinte se si funksionon: në rastin ka një motor, një tabelë kontrolli dhe një rezistencë të ndryshueshme, në bazë të pozicionit të së cilës servo përcakton këndin e boshtit.
Kutia e ingranazhit në këtë servo është plastike, jeta e shërbimit është më e vogël se ajo e një metali dhe nuk i pëlqen ngarkesat e rënda. Tufa për boshtin qendror është bakri ose një lloj aliazhi. Ka një kushinetë në boshtin e daljes. Mund të shtohen lubrifikantë 
Pjesa elektrike 

Truri që kontrollon drejtimin dhe shpejtësinë e rrotullimit, shpejtësinë e ndryshueshme dhe motorin elektrik.
Dhe tani, vëmendja, një "hack jetës", si ta ktheni një servo të rregullt në një servo të rrotullimit të vazhdueshëm 
Në origjinal, ndryshorja me boshtin e saj është mbërthyer në boshtin e daljes nga brenda servo; në versionin e modifikuar, boshti është kafshuar/shkëputur, me sa duket në fazën e montimit, rezistenca është vendosur në pozicionin qendror në mënyrë që boshti nuk rrotullohet në pushim. Nëse shkoni më tej, mund ta hidhni plotësisht dhe ta zëvendësoni me 2 rezistenca konstante identike; është e përshtatshme të vendosni diçka SMD në tabelën e kontrollit.
Total:
serva si serva, jo hapësirë, por as mallra konsumi,
mund te gjendet me lire dhe me kambio metalike
PS
Siç u vërejt saktë në komente, harrova plotësisht të përmend se si kontrollohet servo; servo furnizohet me 5-6 volt dhe një sinjal ppm përmes telit të tretë.
Opsionet më të zakonshme të kontrollit:
1) lidhni fuqinë nga njëra anë, nga ana tjetër daljen me 3 "konsumatorë" (serverët, motorët, etj.) fuqinë dhe sinjalin PPM, mund të përdorni dorezën për të rregulluar shpejtësinë dhe drejtimin e rrotullimit të servo.
2) Pajisja RC në daljet e marrësit është i njëjti sinjal ppm.
3) drejtoni me një arduino
Video
Pps
Si rezultat i "modifikimit", servo ka humbur reagimet, truri nuk e di pozicionin real të boshtit dhe drejtimin e rrotullimit, merrni parasysh këtë pikë nëse do ta blini.
Në këtë artikull do të flasim për servo në projektet Arduino. Është falë motorëve servo që projektet e zakonshme elektronike bëhen robotike. Lidhja e një servo me një projekt Arduino ju lejon t'i përgjigjeni sinjaleve të sensorëve me disa lëvizje të sakta, për shembull, hapni një derë ose ktheni sensorët në drejtimin e dëshiruar. Artikulli diskuton çështjet e kontrollit të servove, skemat e mundshme për lidhjen e servove me Arduino, si dhe shembuj të skicave.
Një servo drive është një lloj disku që mund të kontrollojë saktësisht parametrat e lëvizjes. Me fjalë të tjera, është një motor që mund të rrotullojë boshtin e tij përmes një këndi specifik ose të mbajë rrotullimin e vazhdueshëm në një periudhë të saktë.
Qarku i funksionimit të servo drive bazohet në përdorimin e reagimeve (një qark i mbyllur në të cilin sinjalet hyrëse dhe dalëse nuk përputhen). Servo drive mund të jetë çdo lloj disku mekanik, i cili përfshin një sensor dhe një njësi kontrolli që ruan automatikisht të gjitha parametrat e vendosur në sensor. Servo drive përbëhet nga një motor, një sensor pozicioni dhe një sistem kontrolli. Detyra kryesore e pajisjeve të tilla është zbatimi në fushën e sermekanizmave. Gjithashtu, servo disqet përdoren shpesh në fusha të tilla si përpunimi i materialeve, prodhimi i pajisjeve të transportit, përpunimi i drurit, prodhimi i fletëve metalike, prodhimi i materialeve të ndërtimit dhe të tjera.
Në projektet e robotikës Arduino, servo përdoret shpesh për veprime të thjeshta mekanike:
- Rrotulloni sensorin e distancës ose sensorë të tjerë në një kënd të caktuar për të matur distancën në një fushë të ngushtë shikimi të robotit.
- Bëni një hap të vogël me këmbën tuaj, lëvizni gjymtyrën ose kokën.
- Për të krijuar manipulues robotikë.
- Për të zbatuar mekanizmin e drejtimit.
- Hapni ose mbyllni një derë, kapak ose objekt tjetër.
Natyrisht, fushëveprimi i aplikimit të servo në projekte reale është shumë më i gjerë, por shembujt e dhënë janë skemat më të njohura.
Skema dhe llojet e servove
Parimi i funksionimit të një servo drive bazohet në reagimet nga një ose më shumë sinjale të sistemit. Treguesi i daljes futet në hyrje, ku vlera e tij krahasohet me veprimin e vendosjes dhe kryhen veprimet e nevojshme - për shembull, motori është i fikur. Opsioni më i thjeshtë i zbatimit është një rezistencë e ndryshueshme, e cila kontrollohet nga boshti - kur ndryshojnë parametrat e rezistencës, ndryshojnë parametrat e rrymës që furnizon motorin.
Në servo reale, mekanizmi i kontrollit është shumë më kompleks dhe përdor çipa kontrollues të integruar. Në varësi të llojit të mekanizmit të reagimit të përdorur, ekzistojnë analoge Dhe dixhitale servo. Të parët përdorin diçka të ngjashme me një potenciometër, të dytët përdorin kontrollues.
 I gjithë qarku i kontrollit të servo është i vendosur brenda shtëpisë, sinjalet e kontrollit dhe energjia furnizohen, si rregull, përmes tre telave: toka, tensioni i furnizimit dhe sinjali i kontrollit.
I gjithë qarku i kontrollit të servo është i vendosur brenda shtëpisë, sinjalet e kontrollit dhe energjia furnizohen, si rregull, përmes tre telave: toka, tensioni i furnizimit dhe sinjali i kontrollit.
Servo me rrotullim të vazhdueshëm 360, 180 dhe 270 gradë
Ekzistojnë dy lloje kryesore të servomotorëve - me rrotullim të vazhdueshëm dhe me një kënd fiks (më shpesh, 180 ose 270 gradë). Dallimi midis rrotullimit të kufizuar të servo qëndron në elementët mekanikë të dizajnit që mund të bllokojnë lëvizjen e boshtit jashtë këndeve të specifikuara nga parametrat. Pasi të ketë arritur një kënd prej 180, boshti do të ndikojë në kufizuesin dhe do të japë një komandë për të fikur motorin. Servomotorët me rrotullim të vazhdueshëm nuk kanë kufizues të tillë.
Materialet e ingranazheve servo
Për shumicën e servove, lidhja lidhëse midis boshtit dhe elementëve të jashtëm është një ingranazh, kështu që është shumë e rëndësishme nga çfarë materiali është bërë. Ekzistojnë dy opsione më të përballueshme: ingranazhet metalike ose plastike. Në modelet më të shtrenjta mund të gjeni elementë të bërë nga fibra karboni dhe madje edhe titan.


Opsionet plastike janë natyrisht më të lira, më të lehta për t'u prodhuar dhe shpesh përdoren në servo të lira. Për projektet edukative ku servo bën disa lëvizje, kjo nuk është një punë e madhe. Por në projekte serioze, përdorimi i plastikës është i pamundur, për shkak të konsumit shumë të shpejtë të ingranazheve të tilla nën ngarkesë.
 Ingranazhet metalike janë më të besueshme, por kjo, natyrisht, ndikon si në çmim ashtu edhe në peshën e modelit. Prodhuesit kursimtarë mund të bëjnë disa pjesë plastike dhe disa prej metali, kjo duhet mbajtur gjithashtu parasysh. Dhe, natyrisht, në modelet më të lira, edhe prania e një veshje metalike nuk është një garanci e cilësisë.
Ingranazhet metalike janë më të besueshme, por kjo, natyrisht, ndikon si në çmim ashtu edhe në peshën e modelit. Prodhuesit kursimtarë mund të bëjnë disa pjesë plastike dhe disa prej metali, kjo duhet mbajtur gjithashtu parasysh. Dhe, natyrisht, në modelet më të lira, edhe prania e një veshje metalike nuk është një garanci e cilësisë.
Ingranazhet prej titani ose karboni janë opsioni më i preferuar nëse nuk jeni të kufizuar nga buxheti. Të lehta dhe të besueshme, servo të tillë përdoren gjerësisht për të krijuar modele makinash, dronësh dhe avionësh.
Përparësitë e servo motorëve
Përdorimi i gjerë i disqeve servo është për shkak të faktit se ato kanë funksionim të qëndrueshëm, rezistencë të lartë ndaj ndërhyrjeve, madhësi të vogël dhe një gamë të gjerë të kontrollit të shpejtësisë. Karakteristikat e rëndësishme të servove janë aftësia për të rritur fuqinë dhe për të ofruar reagime informacioni. Dhe rrjedh se në drejtimin përpara qarku është një transmetues energjie, dhe në drejtimin e kundërt është një transmetues informacioni që përdoret për të përmirësuar saktësinë e kontrollit.
Dallimet midis një servo dhe një motori konvencional
Duke ndezur ose fikur një motor elektrik konvencional, ne mund të gjenerojmë një lëvizje rrotulluese dhe të bëjmë që rrotat ose objektet e tjera të lidhura me boshtin të lëvizin. Kjo lëvizje do të jetë e vazhdueshme, por për të kuptuar se në çfarë këndi është kthyer boshti ose sa rrotullime ka bërë, do t'ju duhet të instaloni elementë shtesë të jashtëm: kodues. Servo drive përmban tashmë gjithçka të nevojshme për të marrë informacion në lidhje me parametrat aktual të rrotullimit dhe mund të fiket në mënyrë të pavarur kur boshti rrotullohet në këndin e kërkuar.
Dallimet midis servo dhe motorit stepper
 Një ndryshim i rëndësishëm midis një servo motori dhe një motori stepper është aftësia për të punuar me përshpejtime të larta dhe nën ngarkesa të ndryshueshme. Gjithashtu, servo motorët kanë fuqi më të lartë. Motorët stepper nuk kanë reagime, kështu që mund të vërehet efekti i humbjes së hapave; në servomotorët, humbja e hapave është e përjashtuar - të gjitha shkeljet do të regjistrohen dhe korrigjohen. Me të gjitha këto avantazhe të dukshme, servomotorët janë pajisje më të shtrenjta se motorët stepper, kanë një sistem lidhjeje dhe kontrolli më kompleks dhe kërkojnë mirëmbajtje më të kualifikuar. Është e rëndësishme të theksohet se motorët stepper dhe servo nuk janë konkurrentë të drejtpërdrejtë - secila prej këtyre pajisjeve ka zonën e saj specifike të aplikimit.
Një ndryshim i rëndësishëm midis një servo motori dhe një motori stepper është aftësia për të punuar me përshpejtime të larta dhe nën ngarkesa të ndryshueshme. Gjithashtu, servo motorët kanë fuqi më të lartë. Motorët stepper nuk kanë reagime, kështu që mund të vërehet efekti i humbjes së hapave; në servomotorët, humbja e hapave është e përjashtuar - të gjitha shkeljet do të regjistrohen dhe korrigjohen. Me të gjitha këto avantazhe të dukshme, servomotorët janë pajisje më të shtrenjta se motorët stepper, kanë një sistem lidhjeje dhe kontrolli më kompleks dhe kërkojnë mirëmbajtje më të kualifikuar. Është e rëndësishme të theksohet se motorët stepper dhe servo nuk janë konkurrentë të drejtpërdrejtë - secila prej këtyre pajisjeve ka zonën e saj specifike të aplikimit.
Ku të blini servo të njohura SG90, MG995, MG996
 Opsioni servo më i përballueshëm SG90 1.6KG Opsioni servo më i përballueshëm SG90 1.6KG
|
 Servo drejton SG90 dhe MG90S për Arduino me një çmim nën 70 rubla Servo drejton SG90 dhe MG90S për Arduino me një çmim nën 70 rubla
|
 Një tjetër opsion për servo SG90 Pro 9g nga një furnizues i besuar në Ali Një tjetër opsion për servo SG90 Pro 9g nga një furnizues i besuar në Ali
|
 Servo SG90 nga furnizuesi i besueshëm RobotDyn Servo SG90 nga furnizuesi i besueshëm RobotDyn
|
 Servo testues Servo testues
|
 Disa opsione për testuesit e servo Disa opsione për testuesit e servo
|
 Servo makinë e mbrojtur me një çift rrotullues prej 15 kg Servo makinë e mbrojtur me një çift rrotullues prej 15 kg
|
 Servo JX DC5821LV 21KG Ingranazh mendor i plotë i papërshkueshëm nga uji 1/8 1/10 RC makinë Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90 Servo JX DC5821LV 21KG Ingranazh mendor i plotë i papërshkueshëm nga uji 1/8 1/10 RC makinë Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90
|
 Servo MG996R MG996 Servo Metal Vegla për Futaba JR Servo MG996R MG996 Servo Metal Vegla për Futaba JR
|
 Servo 13 kg 15 kg Servo dixhitale MG995 MG996 MG996R Servo metalike Servo 13 kg 15 kg Servo dixhitale MG995 MG996 MG996R Servo metalike
|
 Faktori vendimtar në kontrollin e servo disqet është sinjali i kontrollit, i cili përbëhet nga impulse me frekuencë konstante dhe gjerësi të ndryshueshme. Gjatësia e pulsit është një nga parametrat më të rëndësishëm që përcakton pozicionin e servo. Kjo gjatësi mund të vendoset në program me dorë duke përdorur metodën e përzgjedhjes së këndit ose duke përdorur komandat e bibliotekës. Për çdo markë pajisjeje, gjatësia mund të jetë e ndryshme.
Faktori vendimtar në kontrollin e servo disqet është sinjali i kontrollit, i cili përbëhet nga impulse me frekuencë konstante dhe gjerësi të ndryshueshme. Gjatësia e pulsit është një nga parametrat më të rëndësishëm që përcakton pozicionin e servo. Kjo gjatësi mund të vendoset në program me dorë duke përdorur metodën e përzgjedhjes së këndit ose duke përdorur komandat e bibliotekës. Për çdo markë pajisjeje, gjatësia mund të jetë e ndryshme.
Kur sinjali hyn në qarkun e kontrollit, gjeneratori jep pulsin e tij, kohëzgjatja e të cilit përcaktohet duke përdorur një potenciometër. Në një pjesë tjetër të qarkut, krahasohen kohëzgjatja e sinjalit të aplikuar dhe sinjali nga gjeneratori. Nëse këto sinjale janë të ndryshme në kohëzgjatje, ndizet motori elektrik, drejtimi i rrotullimit të të cilit përcaktohet nga cili prej pulseve është më i shkurtër. Kur gjatësia e pulsit është e barabartë, motori ndalon.
 Frekuenca standarde në të cilën jepen impulset është 50 Hz, domethënë 1 puls çdo 20 milisekonda. Në këto vlera, kohëzgjatja është 1520 mikrosekonda, dhe servo është në pozicionin e mesëm. Ndryshimi i gjatësisë së pulsit çon në rrotullimin e servo drive - kur rritet kohëzgjatja, rrotullimi është në drejtim të akrepave të orës, dhe kur zvogëlohet, rrotullohet në drejtim të kundërt. Ka kufizime kohëzgjatjeje - në Arduino në bibliotekën Servo, për 0° vlera e pulsit është vendosur në 544 μs (kufiri i poshtëm), për 180° - 2400 μs (kufiri i sipërm).
Frekuenca standarde në të cilën jepen impulset është 50 Hz, domethënë 1 puls çdo 20 milisekonda. Në këto vlera, kohëzgjatja është 1520 mikrosekonda, dhe servo është në pozicionin e mesëm. Ndryshimi i gjatësisë së pulsit çon në rrotullimin e servo drive - kur rritet kohëzgjatja, rrotullimi është në drejtim të akrepave të orës, dhe kur zvogëlohet, rrotullohet në drejtim të kundërt. Ka kufizime kohëzgjatjeje - në Arduino në bibliotekën Servo, për 0° vlera e pulsit është vendosur në 544 μs (kufiri i poshtëm), për 180° - 2400 μs (kufiri i sipërm).

(Imazhi i përdorur nga amperka.ru)
Është e rëndësishme të merret parasysh se në një pajisje specifike, cilësimet mund të ndryshojnë pak nga vlerat e pranuara përgjithësisht. Për disa pajisje, pozicioni dhe gjerësia mesatare e pulsit mund të jetë 760 µs. Të gjitha vlerat e pranuara gjithashtu mund të ndryshojnë pak për shkak të gabimeve që mund të ndodhin gjatë prodhimit të pajisjes.
Metoda e kontrollit të makinës shpesh quhet gabimisht PWM/PWM, por kjo nuk është plotësisht e saktë. Kontrolli varet drejtpërdrejt nga gjatësia e pulsit; shpeshtësia e shfaqjes së tyre nuk është aq e rëndësishme. Funksionimi i saktë do të sigurohet si në 40 Hz ashtu edhe në 60 Hz; vetëm një ulje ose rritje e fortë e frekuencës do të kontribuojë. Nëse ka një rënie të mprehtë, servo drive do të fillojë të funksionojë me vrull; nëse frekuenca rritet mbi 100 Hz, pajisja mund të mbinxehet. Prandaj, është më e saktë ta quajmë atë PDM.
Bazuar në ndërfaqen e brendshme, mund të dallohen servo analoge dhe dixhitale. Nuk ka dallime të jashtme - të gjitha ndryshimet janë vetëm në elektronikën e brendshme. Servo disku analog përmban një çip të veçantë brenda, ndërsa servo disku dixhital përmban një mikroprocesor që merr dhe analizon pulset.

Kur merr një sinjal, servo analog vendos nëse do të ndryshojë apo jo pozicionin dhe, nëse është e nevojshme, i jep motorit një sinjal me një frekuencë prej 50 Hz. Gjatë kohës së reagimit (20 ms), mund të ndodhin ndikime të jashtme që ndryshojnë pozicionin e servo drive dhe pajisja nuk do të ketë kohë për të reaguar. Një servo dixhitale përdor një procesor që furnizon dhe përpunon sinjalet me një frekuencë më të lartë - nga 200 Hz, kështu që mund t'i përgjigjet më shpejt ndikimeve të jashtme dhe të zhvillojë shpejt shpejtësinë dhe çift rrotulluesin e dëshiruar. Prandaj, servo dixhitale do të jetë më në gjendje të mbajë pozicionin e caktuar. Në të njëjtën kohë, servo disqet dixhitale kërkojnë më shumë energji elektrike për të funksionuar, gjë që rrit koston e tyre. Kompleksiteti i prodhimit të tyre gjithashtu jep një kontribut të madh në çmim. Kostoja e lartë është e vetmja pengesë e servove dixhitale; teknikisht, ato janë shumë më të mira se pajisjet analoge.
Lidhja e një servo motori me Arduino
Servo drive ka tre kontakte, të cilat janë të lyera me ngjyra të ndryshme. Teli kafe të çon në tokë, teli i kuq të çon në furnizimin me energji +5V dhe teli portokalli ose i verdhë të çon në telin e sinjalit. Pajisja është e lidhur me Arduino nëpërmjet një tabele buke në mënyrën e treguar në figurë. Teli (sinjali) portokalli është i lidhur me pinin dixhital, telat e zinj dhe të kuq janë të lidhur përkatësisht me tokëzimin dhe fuqinë. Për të kontrolluar servomotorin, nuk keni nevojë të lidheni posaçërisht me kunjat e shiritit - ne kemi përshkruar tashmë parimin e kontrollit të servo më herët.
Nuk rekomandohet lidhja e servove të fuqishme direkt me pllakën, sepse... ata krijojnë një rrymë për qarkun e energjisë Arduino që nuk është në përputhje me jetën - do të jeni me fat nëse mbrojtja funksionon. Më shpesh, simptomat e mbingarkesës dhe furnizimit të pahijshëm me energji të servo janë "dridhja" e servo, një tingull i pakëndshëm dhe rindezja e bordit. Për furnizimin me energji elektrike, është më mirë të përdorni burime të jashtme, sigurohuni që të kombinoni bazat e dy qarqeve.
Skicë për kontrollin e një servo në Arduino
Kontrolli i drejtpërdrejtë i një servo duke ndryshuar kohëzgjatjen e pulsit në skicë është një detyrë jo e parëndësishme, por për fat të mirë ne kemi një bibliotekë të shkëlqyer Servo të integruar në mjedisin e zhvillimit të Arduino. Ne do të shqyrtojmë të gjitha nuancat e programimit dhe punës me servo në një artikull të veçantë. Këtu japim një shembull të thjeshtë të përdorimit të Servo.
Algoritmi i funksionimit është i thjeshtë:
- Fillimisht lidhim Servo.h
- Krijoni një objekt të klasës Servo
- Në bllokun e konfigurimit ne tregojmë se me cilin pin është i lidhur servo
- Ne përdorim metodat e objektit në mënyrën e zakonshme C++. Më e popullarizuara është metoda e shkrimit, së cilës i japim një vlerë të plotë në gradë (për një servo 360, këto vlera do të interpretohen ndryshe).
Një shembull i një skice të thjeshtë për të punuar me një servo drive
Një shembull i një projekti në të cilin së pari vendosim servo motorin në këndin zero dhe më pas e rrotullojmë atë 90 gradë.
#përfshi
Skicë për dy servo
Dhe në këtë shembull ne punojmë me dy servo njëherësh:
#përfshi
Servo kontroll duke përdorur potenciometër
Në këtë shembull, ne e rrotullojmë servo në varësi të vlerës së marrë nga potenciometri. Ne lexojmë vlerën dhe e kthejmë atë në një kënd duke përdorur funksionin e hartës:
//Fragment i një shembulli standard të përdorimit të bibliotekës Servo void loop() ( val = analogRead(A0); // Lexoni vlerën nga kunja me të cilën është lidhur potenciometri val = map(val, 0, 1023, 0, 180); // Shndërroni numrin në rangun nga 0 në 1023 në intervalin e ri - nga 0 në 180. servo.write(val); vonesë (15); )

Karakteristikat dhe lidhja e SG-90
Nëse do të blini servo diskun më të lirë dhe më të thjeshtë, atëherë opsioni më i mirë do të jetë SG 90. Ky servo përdoret më shpesh për të kontrolluar mekanizmat e vegjël e të lehtë me një kënd rrotullimi nga 0° në 180°.
Specifikimet e SG90:
- Shpejtësia e ekzekutimit të komandës 0.12s/60 gradë;
- Fuqia 4.8V;
- Temperaturat e punës nga -30C deri në 60C;
- Përmasat 3,2 x 1,2 x 3 cm;
- Pesha 9 g.
Përshkrimi SG90
Ngjyrat e telave janë standarde. Servo drive është i lirë dhe nuk ofron cilësime të sakta për pozicionet e fillimit dhe të fundit. Për të shmangur mbingarkesat e panevojshme dhe zhurmën karakteristike të kërcitjes në pozicionin 0 dhe 180 gradë, është më mirë të vendosni pikat ekstreme në 10° dhe 170°. Kur përdorni pajisjen, është e rëndësishme të monitoroni tensionin e furnizimit. Nëse ky tregues mbivlerësohet shumë, elementët mekanikë të mekanizmave të ingranazheve mund të dëmtohen.
Servo drejton MG995 dhe MG996 tower pro
Servo MG995 është modeli i dytë më i popullarizuar i servo-ve që lidhet më shpesh me projektet Arduino. Këta janë servo motorë relativisht të lirë me performancë shumë më të mirë se SG90.
Specifikimet MG995
Boshti i daljes në MG995 rrotullohet 120 gradë (60 në çdo drejtim), megjithëse shumë shitës tregojnë 180 gradë. Pajisja është e vendosur në një kuti plastike.
- Pesha 55 g;
- Çift rrotullues 8,5 kg x cm;
- Shpejtësia 0,2s/60 gradë (në 4,8V);
- Fuqia e punës 4.8 – 7.2V;
- Temperaturat e funksionimit - nga 0C në -55C.
Përshkrimi MG995
Lidhja me Arduino ndodh gjithashtu nëpërmjet tre telave. Në parim, për projektet amatore është e mundur të lidhni MG995 direkt me Arduino, por rryma e motorit gjithmonë do të krijojë një ngarkesë të rrezikshme në hyrjet e bordit, kështu që rekomandohet të ndizni servo veçmas, duke mos harruar të lidhni tokën të të dy qarqeve të fuqisë. Një opsion tjetër që e bën jetën më të lehtë do të ishte përdorimi i servo kontrolluesve dhe mburojave të gatshme, të cilat do t'i shqyrtojmë në një artikull të veçantë.
MG996R është i ngjashëm me MG995 në karakteristikat e tij, vetëm vjen në një kuti metalike.
Shndërrimi i një servo drive në një servo me rrotullim të vazhdueshëm
Siç përshkruhet më sipër, servo kontrollohet nga impulse me gjerësi të ndryshueshme që vendosin këndin e rrotullimit. Pozicioni aktual lexohet nga potenciometri. Nëse shkëputni boshtin dhe potenciometrin, servomotori do të marrë pozicionin e rrëshqitjes së potenciometrit si në mes. Të gjitha këto veprime do të çojnë në heqjen e reagimeve. Kjo ju lejon të kontrolloni shpejtësinë dhe drejtimin e rrotullimit përmes telit të sinjalit dhe të krijoni një servo të rrotullimit të vazhdueshëm. Është e rëndësishme të theksohet se një servo me rrotullim konstant nuk mund të rrotullohet përmes një këndi të caktuar dhe të bëjë një numër rreptësisht të specifikuar rrotullimesh.
Për të kryer hapat e mësipërm, do t'ju duhet të çmontoni pajisjen dhe të bëni ndryshime në dizajn.
Në Arduino IDE ju duhet të krijoni një skicë të vogël që do ta vendosë rrotulluesin në pozicionin e mesëm.
#përfshi
Pas kësaj, pajisja duhet të lidhet me Arduino. Kur lidhet, servo do të fillojë të rrotullohet. Është e nevojshme të arrihet ndalimi i plotë i tij duke rregulluar rezistencën. Pasi të ndalojë rrotullimi, duhet të gjeni boshtin, të tërhiqni elementin fleksibël prej tij dhe ta instaloni përsëri.
Kjo metodë ka disa disavantazhe - vendosja e rezistencës në një ndalesë të plotë është e paqëndrueshme; me goditjen / ngrohjen / ftohjen më të vogël, pika zero e rregulluar mund të humbasë. Prandaj, është më mirë të përdorni metodën e zëvendësimit të potenciometrit me një makinë prerëse. Për ta bërë këtë, duhet të hiqni potenciometrin dhe ta zëvendësoni me një rezistencë prerëse me të njëjtën rezistencë. Pika zero duhet të rregullohet duke përdorur një skicë kalibrimi.
Çdo metodë e konvertimit të një servo në një servo me rrotullim të vazhdueshëm ka të metat e veta. Së pari, është e vështirë të rregullosh pikën zero; çdo lëvizje mund ta hedhë atë. Së dyti, diapazoni i kontrollit është i vogël - me një ndryshim të vogël në gjerësinë e pulsit, shpejtësia mund të ndryshojë ndjeshëm. Mund ta zgjeroni gamën në mënyrë programore në Arduino.
konkluzioni
Servo-të luajnë një rol shumë të rëndësishëm në shumë projekte Arduino, nga robotika tek sistemet e shtëpisë inteligjente. Gjithçka që lidhet me lëvizjen tradicionalisht kërkon njohuri të veçanta, dhe krijimi i një disku të plotë dhe që funksionon siç duhet nuk është një detyrë e lehtë. Por me ndihmën e motorëve servo, detyra mund të thjeshtohet në shumë raste, kjo është arsyeja pse servo përdoret vazhdimisht edhe në projektet e nivelit fillestar.
Në këtë artikull, ne u përpoqëm të mbulonim aspekte të ndryshme të përdorimit të servove në projektet Arduino: nga lidhja te shkrimi i skicave. Duke zgjedhur modelin më të thjeshtë servo (për shembull, sg 90), mund të përsërisni me lehtësi shembujt e dhënë dhe të krijoni projektet tuaja të para në të cilat diçka lëviz dhe ndryshon. Shpresojmë se ky artikull do t'ju ndihmojë me këtë.



















