Janë dhënë detyra për punët vendosje-analitike dhe zgjidhje-grafike në të gjitha seksionet e kursit të mekanikës teknike. Çdo detyrë përfshin një përshkrim të zgjidhjes së problemeve me udhëzime të shkurtra, jepen shembuj zgjidhjesh. Anekset përmbajnë materialin e nevojshëm referues. Për nxënësit e specialiteteve të ndërtimit të shkollave të mesme profesionale.
Përcaktimi i reaksioneve të lidhjeve ideale në mënyrë analitike.
1. Tregoni pikën ekuilibri i së cilës po shqyrtohet. Në detyrat për punë të pavarur, një pikë e tillë është qendra e gravitetit të trupit ose pika e kryqëzimit të të gjitha shufrave dhe fijeve.
2. Zbatoni forcat aktive në pikën e konsideruar. Në detyrat për punë të pavarur, forcat aktive janë pesha e trupit ose pesha e ngarkesës, të cilat drejtohen poshtë (më saktë, drejt qendrës së gravitetit të tokës). Në prani të një blloku, pesha e ngarkesës vepron në pikën e konsideruar përgjatë fillit. Drejtimi i kësaj force përcaktohet nga vizatimi. Pesha e trupit zakonisht shënohet me shkronjën G.
3. Hidhni mendërisht lidhjet, duke zëvendësuar veprimin e tyre me reagimet e lidhjeve. Në problemet e propozuara, përdoren tre lloje lidhjesh - një rrafsh ideal i lëmuar, shufra të drejta idealisht të ngurtë dhe fije ideale fleksibël - në vijim të referuara si një plan, një shufër dhe një fije, përkatësisht.
TABELA E PËRMBAJTJES
Parathënie
Seksioni I. Punë e pavarur dhe kontrolluese
Kapitulli 1. Mekanika teorike. Statika
1.1. Përcaktimi analitik i reaksioneve të lidhjes ideale
1.2. Përcaktimi i reaksioneve mbështetëse të një trau në dy mbështetëse nën veprimin e ngarkesave vertikale
1.3. Përcaktimi i pozicionit të qendrës së gravitetit të seksionit
Kapitulli 2. Rezistenca e materialeve
2.1. Përzgjedhja e seksioneve të shufrave bazuar në forcën
2.2. Përcaktimi i momenteve kryesore qendrore të inercisë së seksionit
2.3. Hartimi i forcave prerëse dhe momentet e lakimit për një rreze të thjeshtë
2.4. Përcaktimi i vlerës së lejuar të forcës qendrore shtypëse
Kapitulli 3
3.1. Ndërtimi i diagrameve të forcave të brendshme për kornizën më të thjeshtë me një qark
3.2. Përcaktimi grafik i forcave në shufrat e trungjeve duke ndërtuar një diagram Maxwell-Cremona
3.3. Përcaktimi i lëvizjeve lineare në kornizat më të thjeshta të konsolit
3.4. Llogaritja e një trau statikisht të papërcaktuar (të vazhdueshëm) sipas ekuacionit të tre momenteve
Seksioni II. Vendbanim dhe vepra grafike
Kapitulli 4. Mekanika teorike. Statika
4.1. Përcaktimi i forcave në shufrat e konsolit më të thjeshtë
4.2. Përcaktimi i reaksioneve mbështetëse të një trau në dy mbështetëse
4.3. Përcaktimi i pozicionit të qendrës së gravitetit të seksionit
Kapitulli 5
5.1. Përcaktimi i forcave në shufrat e një sistemi statikisht të papërcaktuar
5.2. Përcaktimi i momenteve kryesore të inercisë së seksionit
5.3. Zgjedhja e seksionit të një trau nga një rreze I i mbështjellë
5.4. Zgjedhja e seksionit të raftit të përbërë të ngjeshur në qendër
Kapitulli 6
6.1. Përcaktimi i forcave në seksionet e një harku me tre varëse
6.2. Përcaktimi grafik i forcave në shufrat e një trungu të sheshtë duke ndërtuar një diagram Maxwell - Kremones
6.3. Llogaritja e një kornize statikisht të papërcaktuar
6.4. Llogaritja e një trau të vazhdueshëm sipas ekuacionit të tre momenteve
Aplikacionet
Bibliografi.
Shkarkoni falas e-libër në një format të përshtatshëm, shikoni dhe lexoni:
Shkarkoni librin Koleksioni i problemeve në mekanikën teknike, Setkov VI, 2003 - fileskachat.com, shkarkim i shpejtë dhe pa pagesë.
Shkarkoni pdf
Më poshtë mund ta blini këtë libër me çmimin më të mirë të zbritur me dërgesë në të gjithë Rusinë.
Shumë studentë të universitetit përballen me vështirësi të caktuara kur fillojnë të mësojnë disiplinat bazë teknike, si forca e materialeve dhe mekanika teorike, në kursin e tyre të studimit. Ky artikull do të shqyrtojë një nga këto lëndë - të ashtuquajturën mekanikë teknike.
Mekanika teknike është një shkencë që studion mekanizma të ndryshëm, sintezën dhe analizën e tyre. Në praktikë, kjo nënkupton një kombinim të tre disiplinave - forca e materialeve, mekanika teorike dhe pjesët e makinerive. Është i përshtatshëm në atë që çdo institucion arsimor zgjedh në çfarë proporcioni për të mësuar këto kurse.
Prandaj, në shumicën e punimeve të kontrollit, detyrat ndahen në tre blloqe, të cilat duhet të zgjidhen veçmas ose së bashku. Le të shqyrtojmë detyrat më të zakonshme.
Seksioni i parë. Mekanika teorike
Nga shumëllojshmëria e problemeve në mekanikën teorike, më së shpeshti mund të hasen probleme nga seksioni i kinematikës dhe statikës. Këto janë detyra mbi ekuilibrin e një kornize të sheshtë, përcaktimin e ligjeve të lëvizjes së trupave dhe analizën kinematike të mekanizmit të levës.
Për të zgjidhur problemet për ekuilibrin e një kornize të sheshtë, është e nevojshme të përdoret ekuacioni i ekuilibrit për një sistem të sheshtë forcash:
![]()
Shuma e projeksioneve të të gjitha forcave në boshtet koordinative është e barabartë me zero dhe shuma e momenteve të të gjitha forcave rreth çdo pike është e barabartë me zero. Duke i zgjidhur këto ekuacione së bashku, ne përcaktojmë madhësinë e reaksioneve të të gjitha mbështetësve të kornizës së sheshtë.
Në detyrat për përcaktimin e parametrave kryesorë kinematikë të lëvizjes së trupave, është e nevojshme, bazuar në një trajektore të caktuar ose ligjin e lëvizjes së një pike materiale, të përcaktohet shpejtësia e saj, nxitimi (i plotë, tangjencial dhe normal) dhe rrezja e lakimi i trajektores. Ligjet e lëvizjes së pikës jepen nga ekuacionet e trajektores:
Projeksionet e shpejtësisë së pikës në boshtet koordinative gjenden duke diferencuar ekuacionet përkatëse:
![]()
Duke diferencuar ekuacionet e shpejtësisë gjejmë projeksionet e nxitimit të pikës. Përshpejtimet tangjenciale dhe normale, rrezja e lakimit të trajektores gjenden grafikisht ose analitikisht:
![]()
![]()
Analiza kinematike e mekanizmit të levës kryhet sipas skemës së mëposhtme:
- Ndarja e mekanizmit në grupe Assur
- Ndërtimi për secilin nga grupet e planeve për shpejtësi dhe përshpejtime
- Përcaktimi i shpejtësive dhe nxitimeve të të gjitha lidhjeve dhe pikave të mekanizmit.
Seksioni dy. Forca e materialeve
Forca e materialeve është një seksion mjaft i vështirë për t'u kuptuar, me shumë detyra të ndryshme, shumica e të cilave zgjidhen sipas metodologjisë së tij. Për ta bërë më të lehtë zgjidhjen e problemeve për studentët, më së shpeshti në kursin e mekanikës së aplikuar atyre u jepen probleme elementare për rezistencën e thjeshtë të strukturave - për më tepër, lloji dhe materiali i strukturës, si rregull, varet nga profilin e universitetit.
Problemet më të zakonshme janë tensioni-ngjeshja, përkulja dhe përdredhja.
Në problemet e tensionit-ngjeshjes, është e nevojshme të ndërtohen diagrame të forcave gjatësore dhe sforcimeve normale, dhe ndonjëherë edhe zhvendosje të seksioneve strukturore.
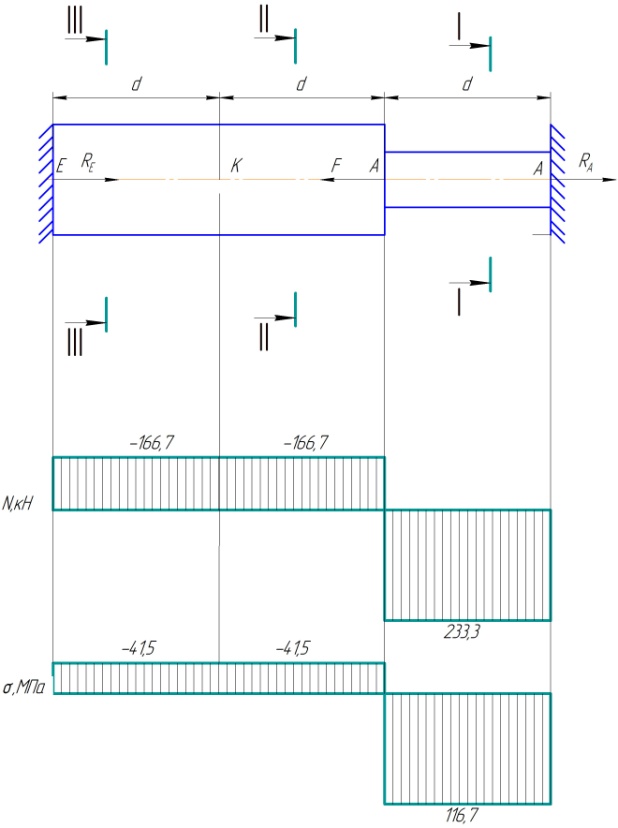
Për ta bërë këtë, është e nevojshme të ndahet struktura në seksione, kufijtë e të cilave do të jenë vendet ku aplikohet ngarkesa ose ndryshon zona e seksionit kryq. Më tej, duke zbatuar formulat për ekuilibrin e një trupi të ngurtë, ne përcaktojmë vlerat e forcave të brendshme në kufijtë e seksioneve dhe, duke marrë parasysh zonën e prerjes kryq, streset e brendshme.
Sipas të dhënave të marra ndërtojmë grafikë - diagrame, duke marrë boshtin e simetrisë së strukturës si bosht grafiku.
Problemet e përdredhjes janë të ngjashme me problemet e përkuljes, me përjashtim të faktit se në vend të forcave tërheqëse, në trup aplikohen çift rrotullues. Duke pasur parasysh këtë, është e nevojshme të përsëriten hapat e llogaritjes - ndarja në seksione, përcaktimi i momenteve të kthesës dhe këndeve të përdredhjes dhe vizatimit.
Në problemet e përkuljes, është e nevojshme të llogariten dhe të përcaktohen forcat tërthore dhe momentet e lakimit për një rreze të ngarkuar.
Së pari, përcaktohen reagimet e mbështetësve në të cilat është fiksuar trau. Për ta bërë këtë, ju duhet të shkruani ekuacionet e ekuilibrit të strukturës, duke marrë parasysh të gjitha forcat që veprojnë.
Pas kësaj, rrezja ndahet në seksione, kufijtë e të cilave do të jenë pikat e aplikimit të forcave të jashtme. Duke marrë parasysh ekuilibrin e secilit seksion veç e veç, përcaktohen forcat tërthore dhe momentet e përkuljes në kufijtë e seksioneve. Në bazë të të dhënave të marra ndërtohen parcela.
Testi i forcës në seksion kryq kryhet si më poshtë:
- Përcaktohet vendndodhja e seksionit të rrezikshëm - seksioni ku do të veprojnë momentet më të mëdha të përkuljes.
- Nga gjendja e forcës në përkulje përcaktohet momenti i rezistencës së prerjes tërthore të traut.
- Përcaktohet madhësia karakteristike e seksionit - diametri, gjatësia e anës ose numri i profilit.
Seksioni i tretë. Pjesë makine
Seksioni "Detajet e makinës" kombinon të gjitha detyrat për llogaritjen e mekanizmave që funksionojnë në kushte reale - kjo mund të jetë një transportues ose një tren ingranazhesh. Ajo lehtëson shumë detyrën që të gjitha formulat dhe metodat e llogaritjes të jepen në librat e referencës, dhe studenti duhet vetëm të zgjedhë ato që janë të përshtatshme për një mekanizëm të caktuar.
Letërsia
- Mekanika teorike: Udhëzime dhe detyra kontrolli për studentët me kohë të pjesshme të specialiteteve të inxhinierisë, ndërtimit, transportit, instrument-bërjes së institucioneve të arsimit të lartë / Ed. prof. S.M.Targa, - M .: Shkolla e lartë, 1989. Botim i katërt;
- A. V. Darkov, G. S. Shpiro. "Forca e materialeve";
- Chernavsky S.A. Projektimi i kursit të pjesëve të makinerive: Proc. manual për studentët e specialiteteve të inxhinierisë mekanike të shkollave teknike / S. A. Chernavsky, K. N. Bokov, I. M. Chernin, etj. - Botimi i 2-të, i rishikuar. dhe shtesë - M. Mashinostroenie, 1988. - 416 f.: ill.
Zgjidhje e mekanikës teknike me porosi
Kompania jonë ofron gjithashtu shërbime për zgjidhjen e problemeve dhe testeve në mekanikë. Nëse keni vështirësi për të kuptuar këtë temë, gjithmonë mund të porosisni një zgjidhje të detajuar nga ne. Ne marrim përsipër detyra të vështira!
mund të jetë i lirë.
Mekanika teorike- Kjo është një degë e mekanikës, e cila përcakton ligjet bazë të lëvizjes mekanike dhe bashkëveprimit mekanik të trupave materiale.
Mekanika teorike është një shkencë në të cilën studiohen lëvizjet e trupave me kalimin e kohës (lëvizjet mekanike). Ai shërben si bazë për seksione të tjera të mekanikës (teoria e elasticitetit, rezistenca e materialeve, teoria e plasticitetit, teoria e mekanizmave dhe makinave, hidroaerodinamika) dhe shumë disiplina teknike.
lëvizje mekanike- ky është një ndryshim me kalimin e kohës në pozicionin relativ në hapësirë të trupave materialë.
Ndërveprimi mekanik- ky është një ndërveprim i tillë, si rezultat i të cilit lëvizja mekanike ndryshon ose pozicioni relativ i pjesëve të trupit ndryshon.
Statika e ngurtë e trupit
Statika- Kjo është një degë e mekanikës teorike, e cila merret me problemet e ekuilibrit të trupave të ngurtë dhe shndërrimin e një sistemi forcash në një tjetër, ekuivalent me të.
- Konceptet dhe ligjet bazë të statikës
- Trup absolutisht i ngurtë(trup i ngurtë, trup) është një trup material, distanca ndërmjet çdo pike në të cilën nuk ndryshon.
- Pika materialeështë një trup përmasat e të cilit, sipas kushteve të problemit, mund të neglizhohen.
- trup i lirshëmështë një organ, në lëvizjen e të cilit nuk vendosen kufizime.
- Trup jo i lirë (i lidhur).është një trup lëvizja e të cilit është e kufizuar.
- Lidhjet- këto janë trupa që pengojnë lëvizjen e objektit në shqyrtim (një trup ose një sistem trupash).
- Reagimi i komunikimitështë një forcë që karakterizon veprimin e një lidhjeje në një trup të ngurtë. Nëse marrim si veprim forcën me të cilën një trup i ngurtë vepron në një lidhje, atëherë reaksioni i lidhjes është kundërveprim. Në këtë rast, forca - veprimi zbatohet në lidhje, dhe reagimi i lidhjes zbatohet në trupin e ngurtë.
- sistemi mekanikështë një grup trupash ose pikash materiale të ndërlidhura.
- Të ngurta mund të konsiderohet si një sistem mekanik, pozicionet dhe distanca ndërmjet pikave të të cilit nuk ndryshojnë.
- Forcaështë një sasi vektoriale që karakterizon veprimin mekanik të një trupi material mbi një tjetër.
Forca si vektor karakterizohet nga pika e aplikimit, drejtimi i veprimit dhe vlera absolute. Njësia matëse për modulin e forcës është Njutoni. - linja e forcësështë vija e drejtë përgjatë së cilës është drejtuar vektori i forcës.
- Fuqia e përqendruarështë forca e aplikuar në një pikë.
- Forcat e shpërndara (ngarkesa e shpërndarë)- këto janë forca që veprojnë në të gjitha pikat e vëllimit, sipërfaqes ose gjatësisë së trupit.
Ngarkesa e shpërndarë jepet nga forca që vepron për njësi vëllimi (sipërfaqja, gjatësia).
Dimensioni i ngarkesës së shpërndarë është N / m 3 (N / m 2, N / m). - Forca e jashtmeështë një forcë që vepron nga një trup që nuk i përket sistemit mekanik të konsideruar.
- force e brendshmeështë forca që vepron në një pikë materiale të një sistemi mekanik nga një pikë tjetër materiale që i përket sistemit në shqyrtim.
- Sistemi i forcësështë tërësia e forcave që veprojnë në një sistem mekanik.
- Sistemi i sheshtë i forcaveështë një sistem forcash, linjat e veprimit të të cilave shtrihen në të njëjtin rrafsh.
- Sistemi hapësinor i forcaveështë një sistem forcash, linjat e veprimit të të cilëve nuk shtrihen në të njëjtin rrafsh.
- Sistemi i forcës konvergjenteështë një sistem forcash linjat e veprimit të të cilave kryqëzohen në një pikë.
- Sistemi arbitrar i forcaveështë një sistem forcash, vijat e veprimit të të cilave nuk kryqëzohen në një pikë.
- Sistemet ekuivalente të forcave- këto janë sisteme forcash, zëvendësimi i të cilave njëri me tjetrin nuk ndryshon gjendjen mekanike të trupit.
Emërtimi i pranuar: . - Ekuilibri Një gjendje në të cilën një trup qëndron i palëvizshëm ose lëviz në mënyrë të njëtrajtshme në një vijë të drejtë nën veprimin e forcave.
- Sistemi i balancuar i forcave- ky është një sistem forcash që, duke u aplikuar në një trup të ngurtë të lirë, nuk e ndryshon gjendjen e tij mekanike (nuk e çekuilibron atë).
 .
. - forcë rezultanteështë një forcë, veprimi i së cilës në një trup është i barabartë me veprimin e një sistemi forcash.
 .
. - Momenti i fuqisëështë një vlerë që karakterizon aftësinë rrotulluese të forcës.
- Çifti i fuqisëështë një sistem i dy forcave paralele të barabarta në vlerë absolute me drejtim të kundërt.
Emërtimi i pranuar: .
Nën veprimin e disa forcave, trupi do të kryejë një lëvizje rrotulluese. - Projeksioni i forcës në bosht- ky është një segment i mbyllur midis pinguleve të tërhequra nga fillimi dhe fundi i vektorit të forcës në këtë bosht.
Projeksioni është pozitiv nëse drejtimi i segmentit përkon me drejtimin pozitiv të boshtit. - Projeksioni i forcës në një aeroplanështë një vektor në një rrafsh të mbyllur midis pinguleve të tërhequra nga fillimi dhe fundi i vektorit të forcës në këtë rrafsh.
- Ligji 1 (ligji i inercisë). Një pikë e izoluar materiale është në prehje ose lëviz në mënyrë të njëtrajtshme dhe drejtvizore.
Lëvizja uniforme dhe drejtvizore e një pike materiale është një lëvizje nga inercia. Gjendja e ekuilibrit të një pike materiale dhe një trupi të ngurtë kuptohet jo vetëm si gjendje prehjeje, por edhe si lëvizje me inerci. Për një trup të ngurtë, ekzistojnë lloje të ndryshme të lëvizjes së inercisë, për shembull, rrotullimi uniform i një trupi të ngurtë rreth një boshti fiks. - Ligji 2. Një trup i ngurtë është në ekuilibër nën veprimin e dy forcave vetëm nëse këto forca janë të barabarta në madhësi dhe të drejtuara në drejtime të kundërta përgjatë një linje të përbashkët veprimi.
Këto dy forca quhen të balancuara.
Në përgjithësi, forcat thuhet se janë të balancuara nëse trupi i ngurtë ndaj të cilit zbatohen këto forca është në qetësi. - Ligji 3. Pa cenuar gjendjen (fjala "gjendje" këtu nënkupton gjendjen e lëvizjes ose pushimit) të një trupi të ngurtë, mund të shtohen dhe të hidhen poshtë forcat balancuese.
Pasoja. Pa e shqetësuar gjendjen e një trupi të ngurtë, forca mund të transferohet përgjatë vijës së veprimit të saj në çdo pikë të trupit.
Dy sisteme forcash quhen ekuivalente nëse njëri prej tyre mund të zëvendësohet me një tjetër pa e dëmtuar gjendjen e trupit të ngurtë. - Ligji 4. Rezultantja e dy forcave të aplikuara në një pikë zbatohet në të njëjtën pikë, është e barabartë në vlerë absolute me diagonalen e paralelogramit të ndërtuar mbi këto forca dhe drejtohet përgjatë kësaj
diagonale.
Moduli i rezultatit është: - Ligji 5 (ligji i barazisë së veprimit dhe reagimit). Forcat me të cilat veprojnë dy trupa mbi njëri-tjetrin janë të barabarta në madhësi dhe të drejtuara në drejtime të kundërta përgjatë një vije të drejtë.
Duhet pasur parasysh se veprim- forca e aplikuar në trup B, dhe opozita- forca e aplikuar në trup POR, nuk janë të ekuilibruar, pasi janë të lidhur me trupa të ndryshëm. - Ligji 6 (ligji i ngurtësimit). Ekuilibri i një trupi jo të ngurtë nuk prishet kur ai ngurtësohet.
Nuk duhet harruar se kushtet e ekuilibrit, të nevojshme dhe të mjaftueshme për një trup të ngurtë, janë të nevojshme por të pamjaftueshme për trupin përkatës jo të ngurtë. - Ligji 7 (ligji i lirimit nga obligacionet). Një lëndë e ngurtë jo e lirë mund të konsiderohet si e lirë nëse është e çliruar mendërisht nga lidhjet, duke zëvendësuar veprimin e lidhjeve me reaksionet përkatëse të lidhjeve.
- Lidhjet dhe reagimet e tyre
- Sipërfaqe e lëmuar kufizon lëvizjen përgjatë normales në sipërfaqen mbështetëse. Reagimi drejtohet pingul me sipërfaqen.
- Mbështetje e lëvizshme e artikuluar kufizon lëvizjen e trupit përgjatë normales në rrafshin referues. Reagimi drejtohet përgjatë normales në sipërfaqen mbështetëse.
- Mbështetje fikse e artikuluar kundërvepron çdo lëvizje në një rrafsh pingul me boshtin e rrotullimit.
- Shufra e artikuluar pa peshë kundërvepron lëvizjen e trupit përgjatë vijës së shufrës. Reagimi do të drejtohet përgjatë vijës së shufrës.
- Përfundimi i verbër kundërvepron çdo lëvizje dhe rrotullim në rrafsh. Veprimi i tij mund të zëvendësohet nga një forcë e paraqitur në formën e dy komponentëve dhe një palë forcash me një moment.




Kinematika
Kinematika- një pjesë e mekanikës teorike, e cila merr në konsideratë vetitë e përgjithshme gjeometrike të lëvizjes mekanike, si një proces që ndodh në hapësirë dhe kohë. Objektet në lëvizje konsiderohen si pika gjeometrike ose trupa gjeometrikë.
- Konceptet themelore të kinematikës
- Ligji i lëvizjes së një pike (trupi)është varësia e pozicionit të një pike (trupi) në hapësirë nga koha.
- Trajektorja e pikësështë vendndodhja e pozicioneve të një pike në hapësirë gjatë lëvizjes së saj.
- Shpejtësia e pikës (trupit).- kjo është një karakteristikë e ndryshimit në kohë të pozicionit të një pike (trupi) në hapësirë.
- Nxitimi i pikës (trupit).- kjo është një karakteristikë e ndryshimit në kohë të shpejtësisë së një pike (trupi).
- Përcaktimi i karakteristikave kinematike të një pike
- Trajektorja e pikës
Në sistemin e referencës vektoriale, trajektorja përshkruhet me shprehjen: .
Në sistemin e referencës së koordinatave, trajektorja përcaktohet sipas ligjit të lëvizjes së pikës dhe përshkruhet nga shprehjet z = f(x,y) në hapësirë, ose y = f(x)- në aeroplan.
Në një sistem referimi natyror, trajektorja është e paracaktuar. - Përcaktimi i shpejtësisë së një pike në një sistem koordinativ vektorial
Kur specifikohet lëvizja e një pike në një sistem koordinativ vektorial, raporti i lëvizjes me intervalin kohor quhet vlera mesatare e shpejtësisë në këtë interval kohor: .
Duke marrë intervalin kohor si një vlerë pafundësisht të vogël, fitohet vlera e shpejtësisë në një moment të caktuar kohor (vlera e menjëhershme e shpejtësisë): .
.
Vektori i shpejtësisë mesatare drejtohet përgjatë vektorit në drejtim të lëvizjes së pikës, vektori i shpejtësisë së menjëhershme drejtohet tangjencialisht në trajektoren në drejtim të lëvizjes së pikës.
konkluzioni: shpejtësia e një pike është një sasi vektoriale e barabartë me derivatin e ligjit të lëvizjes në lidhje me kohën.
Vetia derivative: derivati kohor i çdo vlere përcakton shkallën e ndryshimit të kësaj vlere. - Përcaktimi i shpejtësisë së një pike në një sistem referimi koordinativ
Shkalla e ndryshimit të koordinatave të pikave: .
.
Moduli i shpejtësisë së plotë të një pike me një sistem koordinativ drejtkëndor do të jetë i barabartë me: .
.
Drejtimi i vektorit të shpejtësisë përcaktohet nga kosinuset e këndeve të drejtimit: ,
,
ku janë këndet ndërmjet vektorit të shpejtësisë dhe boshteve të koordinatave. - Përcaktimi i shpejtësisë së një pike në një sistem referimi natyror
Shpejtësia e një pike në një sistem referimi natyror përcaktohet si një derivat i ligjit të lëvizjes së një pike: .
Sipas përfundimeve të mëparshme, vektori i shpejtësisë drejtohet në mënyrë tangjenciale në trajektoren në drejtim të lëvizjes së pikës dhe në boshtet përcaktohet vetëm nga një projeksion.
- Kinematika e trupit të ngurtë
- Në kinematikën e trupave të ngurtë zgjidhen dy probleme kryesore:
1) detyra e lëvizjes dhe përcaktimi i karakteristikave kinematike të trupit në tërësi;
2) përcaktimi i karakteristikave kinematike të pikave të trupit. - Lëvizja përkthimore e një trupi të ngurtë
Lëvizja përkthimore është një lëvizje në të cilën një vijë e drejtë e tërhequr nëpër dy pika të trupit mbetet paralele me pozicionin e saj origjinal.
Teorema: në lëvizjen përkthimore, të gjitha pikat e trupit lëvizin përgjatë të njëjtave trajektore dhe në çdo moment të kohës kanë të njëjtat shpejtësi dhe nxitime në madhësi dhe drejtim..
konkluzioni: Lëvizja përkthimore e një trupi të ngurtë përcaktohet nga lëvizja e ndonjë prej pikave të tij, dhe për këtë arsye, detyra dhe studimi i lëvizjes së tij reduktohet në kinematikën e një pike.. - Lëvizja rrotulluese e një trupi të ngurtë rreth një boshti fiks
Lëvizja rrotulluese e një trupi të ngurtë rreth një boshti fiks është lëvizja e një trupi të ngurtë në të cilin dy pika që i përkasin trupit mbeten të palëvizshme gjatë gjithë kohës së lëvizjes.
Pozicioni i trupit përcaktohet nga këndi i rrotullimit. Njësia matëse për një kënd është radianet. (Një radian është këndi qendror i një rrethi gjatësia e harkut të të cilit është e barabartë me rrezen, këndi i plotë i rrethit përmban 2π radian.)
Ligji i lëvizjes rrotulluese të një trupi rreth një boshti fiks.
Shpejtësia këndore dhe nxitimi këndor i trupit do të përcaktohen me metodën e diferencimit:
- shpejtësia këndore, rad/s;
— nxitimi këndor, rad/s².
Nëse e presim trupin me një rrafsh pingul me boshtin, zgjidhni një pikë në boshtin e rrotullimit Me dhe një pikë arbitrare M, pastaj pika M do të përshkruajë rreth pikës Me rrethi me rreze R. gjatë dt ka një rrotullim elementar nëpër këndin , ndërsa pika M do të lëvizë përgjatë trajektores për një distancë .
.
Moduli i shpejtësisë lineare: .
.
nxitimi i pikës M me një trajektore të njohur përcaktohet nga përbërësit e saj: ,
,
ku .
.
Si rezultat, marrim formula
nxitimi tangjencial: ;
;
nxitimi normal: .
.

Dinamika
Dinamika- Kjo është një degë e mekanikës teorike, e cila studion lëvizjet mekanike të trupave materiale, në varësi të shkaqeve që i shkaktojnë ato.
- Konceptet themelore të dinamikës
- inercia- kjo është veti e trupave materialë për të mbajtur një gjendje pushimi ose lëvizje drejtvizore uniforme derisa forcat e jashtme ta ndryshojnë këtë gjendje.
- Peshaështë një masë sasiore e inercisë së një trupi. Njësia e masës është kilogram (kg).
- Pika materialeështë një trup me masë, përmasat e të cilit neglizhohen në zgjidhjen e këtij problemi.
- Qendra e masës së një sistemi mekanikështë një pikë gjeometrike, koordinatat e së cilës përcaktohen nga formula:
ku m k, x k, y k, z k- masa dhe koordinatat k- ajo pikë e sistemit mekanik, mështë masa e sistemit.
Në një fushë uniforme të gravitetit, pozicioni i qendrës së masës përkon me pozicionin e qendrës së gravitetit. - Momenti i inercisë së një trupi material rreth boshtitështë një masë sasiore e inercisë gjatë lëvizjes rrotulluese.
Momenti i inercisë së një pike materiale rreth boshtit është i barabartë me produktin e masës së pikës dhe katrorin e distancës së pikës nga boshti: .
.
Momenti i inercisë së sistemit (trupit) rreth boshtit është i barabartë me shumën aritmetike të momenteve të inercisë së të gjitha pikave:
- Forca e inercisë së një pike materialeështë një sasi vektoriale e barabartë në vlerë absolute me produktin e masës së një pike dhe modulit të nxitimit dhe e drejtuar në kundërshtim me vektorin e nxitimit:
- Forca e inercisë së një trupi materialështë një sasi vektoriale e barabartë në vlerë absolute me produktin e masës trupore dhe modulin e nxitimit të qendrës së masës së trupit dhe e drejtuar përballë vektorit të nxitimit të qendrës së masës: ,
ku është nxitimi i qendrës së masës së trupit. - Impulsi i forcës elementareështë një sasi vektoriale e barabartë me produktin e vektorit të forcës me një interval kohor pafundësisht të vogël dt:
.
Impulsi total i forcës për Δt është i barabartë me integralin e impulseve elementare: .
. - Puna elementare e forcësështë një skalar dA, e barabartë me skalarin
Kinematika
Kinematika e një pike materiale
Përcaktimi i shpejtësisë dhe nxitimit të një pike sipas ekuacioneve të dhëna të lëvizjes së saj
Jepen: Ekuacionet e lëvizjes së një pike: x = 12 mëkat (πt/6), cm; y= 6 cos 2 (πt/6), cm.
Përcaktoni llojin e trajektores së saj dhe për momentin e kohës t = 1 s gjeni pozicionin e një pike në trajektore, shpejtësinë e saj, nxitimet e plota, tangjenciale dhe normale, si dhe rrezen e lakimit të trajektores.
Lëvizja përkthimore dhe rrotulluese e një trupi të ngurtë

E dhënë:
t = 2 s; r 1 = 2 cm, R 1 = 4 cm; r 2 = 6 cm, R 2 = 8 cm; r 3 \u003d 12 cm, R 3 \u003d 16 cm; s 5 \u003d t 3 - 6t (cm).
Përcaktoni në kohën t = 2 shpejtësitë e pikave A, C; nxitimi këndor i rrotës 3; Nxitimi i pikës B dhe nxitimi i raftit 4.
Analiza kinematike e një mekanizmi të sheshtë

E dhënë:
R 1 , R 2 , L, AB, ω 1 .
Gjeni: ω 2 .

Mekanizmi i sheshtë përbëhet nga shufrat 1, 2, 3, 4 dhe rrëshqitësi E. Shufrat lidhen me anë të menteshave cilindrike. Pika D ndodhet në mes të shiritit AB.
Jepet: ω 1 , ε 1 .
Gjeni: shpejtësitë V A , V B , V D dhe V E ; shpejtësitë këndore ω 2 , ω 3 dhe ω 4 ; nxitimi a B; nxitimi këndor ε AB i lidhjes AB; pozicionet e qendrave të menjëhershme të shpejtësive P 2 dhe P 3 të lidhjeve 2 dhe 3 të mekanizmit.
Përcaktimi i shpejtësisë absolute dhe nxitimit absolut të një pike

Një pllakë drejtkëndëshe rrotullohet rreth një boshti fiks sipas ligjit φ = 6 t 2 - 3 t 3. Drejtimi pozitiv i leximit të këndit φ tregohet në figura me një shigjetë harku. Boshti i rrotullimit OO 1 shtrihet në rrafshin e pllakës (pllaka rrotullohet në hapësirë).
Pika M lëviz përgjatë vijës së drejtë BD përgjatë pllakës. Është dhënë ligji i lëvizjes së tij relative, d.m.th., varësia s = AM = 40 (t - 2 t 3) - 40(s - në centimetra, t - në sekonda). Distanca b = 20 cm. Në figurë, pika M është paraqitur në pozicionin ku s = AM > 0 (për s< 0 pika M është në anën tjetër të pikës A).
Gjeni shpejtësinë absolute dhe nxitimin absolut të pikës M në kohën t 1 = 1 s.
Dinamika
Integrimi i ekuacioneve diferenciale të lëvizjes së një pike materiale nën veprimin e forcave të ndryshueshme
Një ngarkesë D me masë m, pasi ka marrë një shpejtësi fillestare V 0 në pikën A, lëviz në një tub të lakuar ABC të vendosur në një plan vertikal. Në seksionin AB, gjatësia e të cilit është l, ngarkesa ndikohet nga një forcë konstante T (drejtimi i saj tregohet në figurë) dhe forca R e rezistencës së mediumit (moduli i kësaj force është R = μV 2, vektori R është i drejtuar në kundërshtim me shpejtësinë V të ngarkesës).
Ngarkesa, pasi ka përfunduar lëvizjen e saj në seksionin AB, në pikën B të tubit, pa ndryshuar vlerën e modulit të shpejtësisë së saj, kalon në seksionin BC. Në seksionin BC, mbi ngarkesën vepron një forcë e ndryshueshme F, projeksioni F x i së cilës në boshtin x është dhënë.
Duke e konsideruar ngarkesën si pikë materiale, gjeni ligjin e lëvizjes së saj në seksionin BC, d.m.th. x = f(t), ku x = BD. Injoroni fërkimin e ngarkesës në tub.

Shkarko zgjidhje
Teorema mbi ndryshimin e energjisë kinetike të një sistemi mekanik
Sistemi mekanik përbëhet nga peshat 1 dhe 2, një rul cilindrik 3, rrotullat me dy faza 4 dhe 5. Trupat e sistemit janë të lidhur me fije të mbështjella në rrotulla; seksionet e fijeve janë paralele me rrafshet përkatëse. Roli (cilindër i ngurtë homogjen) rrotullohet përgjatë planit të referencës pa rrëshqitur. Rrezet e hapave të rrotullave 4 dhe 5 janë përkatësisht R 4 = 0,3 m, r 4 = 0,1 m, R 5 = 0,2 m, r 5 = 0,1 m Masa e secilës rrotull konsiderohet e shpërndarë në mënyrë uniforme përgjatë buzës së saj të jashtme. Planet mbajtëse të peshave 1 dhe 2 janë të përafërt, koeficienti i fërkimit të rrëshqitjes për secilën peshë është f = 0,1.
Nën veprimin e forcës F, moduli i së cilës ndryshon sipas ligjit F = F(s), ku s është zhvendosja e pikës së zbatimit të saj, sistemi fillon të lëvizë nga një gjendje pushimi. Kur sistemi lëviz, forcat e rezistencës veprojnë në rrotullën 5, momenti i së cilës në lidhje me boshtin e rrotullimit është konstant dhe i barabartë me M5.
Përcaktoni vlerën e shpejtësisë këndore të rrotullës 4 në momentin kur zhvendosja s e pikës së zbatimit të forcës F bëhet e barabartë me s 1 = 1,2 m. 
Shkarko zgjidhje
Zbatimi i ekuacionit të përgjithshëm të dinamikës në studimin e lëvizjes së një sistemi mekanik
Për një sistem mekanik, përcaktoni nxitimin linear a 1 . Konsideroni që për blloqet dhe rrotullat masat shpërndahen përgjatë rrezes së jashtme. Kabllot dhe rripat konsiderohen pa peshë dhe të pazgjatur; nuk ka rrëshqitje. Injoroni fërkimin e rrotullimit dhe rrëshqitjes. 
Shkarko zgjidhje
Zbatimi i parimit d'Alembert në përcaktimin e reaksioneve të mbështetësve të një trupi rrotullues
Një bosht vertikal AK që rrotullohet në mënyrë të njëtrajtshme me një shpejtësi këndore ω = 10 s -1 është i fiksuar me një kushinetë shtytës në pikën A dhe një kushinetë cilindrike në pikën D.
Një shufër pa peshë 1 me gjatësi l 1 = 0,3 m është ngjitur fort në bosht, në skajin e lirë të së cilës ka një ngarkesë me masë m 1 = 4 kg, dhe një shufër homogjene 2 me gjatësi l 2 = 0,6 m, me masë m 2 = 8 kg. Të dy shufrat shtrihen në të njëjtin plan vertikal. Pikat e lidhjes së shufrave në bosht, si dhe këndet α dhe β tregohen në tabelë. Dimensionet AB=BD=DE=EK=b, ku b = 0,4 m Merreni ngarkesën si pikë materiale.
Duke neglizhuar masën e boshtit, përcaktoni reagimet e kushinetave të shtytjes dhe kushinetave.




















